[Raspbot] v2 자율주행 프로젝트 시작
시작하며
학교 12주 수업 이후 남은 3주동안 P_project로 자율주행자동차 구현을 하게되었다. 목표는 안정적 주행/신호등 인식/장애물 인식/주차 인식이었다. 수업 시간에 배우는 예제와 알고리즘이 저순에 머물러 있다는 생각이 들어서 직접 모든 코드를 작성하게되었다. 수업 시간 예제로 주신 코드는 평시 직진 주행을 하다가 벽을 감지하면 반대 방향으로 회전하는 로직만을 포함하고 있다. 하지만 나는 센서 노이즈가 일반 도로 바닥을 벽으로 인지하면, 급회전이 일어나는 등 여러 문제점이 있을 것 같다고 생각했다. 그래서 벽을 감지하는 것이 아닌 검은색 바닥을 감지하여 노이즈 위험을 줄이고 조향 또한 연속적으로 제어하는 것을 목표로 설계를 시작했다.
내가 쓰지 않은 수업 예제 코드 전문
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Raspbot v2 자율주행 테스트 코드 (기본 기능)
import sys
import os
# ============================
# 1단계: 라이브러리 및 모듈 import
# ============================
print("=" * 50)
print(" STEP 1: Loading Libraries...")
print("=" * 50)
# Raspbot 라이브러리 경로 추가
sys.path.append(os.path.join(os.path.dirname(__file__), "..", "lib", "raspbot"))
import cv2
import numpy as np
import random
import time
from Raspbot_Lib import Raspbot
print("Libraries loaded successfully\n")
# ============================
# 사용자 설정 영역
# ============================
print("=" * 50)
print(" STEP 2: Loading Configuration...")
print("=" * 50)
# 기본 속도 설정 (-255 ~ 255)
DEFAULT_SPEED_UP = 40
DEFAULT_SPEED_DOWN = 30
# 라인 검출 설정
DEFAULT_DETECT_VALUE = 120
DEFAULT_BRIGHTNESS = 0
DEFAULT_CONTRAST = 0
# 방향 판단 임계값
DEFAULT_DIRECTION_THRESHOLD = 35000
DEFAULT_UP_THRESHOLD = 220000
# 서보 모터 각도
DEFAULT_SERVO_1 = 70 # 좌우 각도 (0~180)
DEFAULT_SERVO_2 = 10 # 상하 각도 (0~110)
# 디버그 모드
DEBUG_MODE = True
# LED 효과 사용
USE_LED_EFFECTS = True
LED_ON_START = True
# 부저 사용
USE_BEEP = True
BEEP_ON_START = True
BEEP_ON_TURN = False
print("Configuration loaded successfully\n")
# ============================
# 2단계: 하드웨어 초기화
# ============================
print("=" * 50)
print(" STEP 3: Initializing Hardware...")
print("=" * 50)
def initialize_raspbot():
"""Raspbot 하드웨어 초기화"""
try:
bot = Raspbot()
print("Raspbot hardware initialized successfully")
return bot
except Exception as e:
print(f"Failed to initialize Raspbot: {e}")
sys.exit(1)
def initialize_camera(width=320, height=240):
"""카메라 초기화 및 설정"""
try:
print("\nInitializing camera...")
cap = cv2.VideoCapture(0)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, width)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, height)
cap.set(cv2.CAP_PROP_BRIGHTNESS, DEFAULT_BRIGHTNESS)
cap.set(cv2.CAP_PROP_CONTRAST, DEFAULT_CONTRAST)
cap.set(cv2.CAP_PROP_SATURATION, 50)
cap.set(cv2.CAP_PROP_EXPOSURE, 100)
ret, frame = cap.read()
if not ret or frame is None:
raise Exception("Cannot read frame from camera")
actual_height, actual_width = frame.shape[:2]
print(f"USB camera initialized successfully")
print(f" - Requested resolution: {width}x{height}")
print(f" - Actual resolution: {actual_width}x{actual_height}")
return cap
except Exception as e:
print(f"\nFailed to initialize camera: {e}\n")
raise
def setup_initial_hardware_state(bot):
"""초기 하드웨어 상태 설정"""
# LED 초기화
if LED_ON_START and USE_LED_EFFECTS:
bot.Ctrl_WQ2812_ALL(1, 2)
print("LED initialized")
# 부저 테스트
if BEEP_ON_START and USE_BEEP:
bot.Ctrl_BEEP_Switch(1)
time.sleep(0.2)
bot.Ctrl_BEEP_Switch(0)
print("Beeper test completed")
# 서보 모터 초기 위치
bot.Ctrl_Servo(1, DEFAULT_SERVO_1)
bot.Ctrl_Servo(2, DEFAULT_SERVO_2)
print(
f"Servo motors initialized (S1:{DEFAULT_SERVO_1}deg, S2:{DEFAULT_SERVO_2}deg)"
)
# 모터 정지
for i in range(4):
bot.Ctrl_Muto(i, 0)
print("Motors stopped and initialized\n")
# Raspbot 및 카메라 초기화
bot = initialize_raspbot()
try:
cap = initialize_camera()
except Exception as e:
del bot
sys.exit(1)
setup_initial_hardware_state(bot)
# ============================
# 3단계: 트랙바 및 윈도우 설정
# ============================
print("=" * 50)
print(" STEP 4: Setting up Trackbars and Windows...")
print("=" * 50)
def nothing(x):
"""트랙바 콜백 함수"""
pass
# 윈도우 생성 (크기 조절 가능)
# Camera Settings 윈도우를 먼저 생성하고 크기 설정
cv2.namedWindow("Camera Settings", cv2.WINDOW_NORMAL)
cv2.resizeWindow("Camera Settings", 500, 800)
cv2.namedWindow("1_Frame", cv2.WINDOW_NORMAL)
cv2.namedWindow("2_frame_transformed", cv2.WINDOW_NORMAL)
cv2.namedWindow("3_gray_frame", cv2.WINDOW_NORMAL)
cv2.namedWindow("4_Processed Frame", cv2.WINDOW_NORMAL)
# 4_Processed Frame 창을 더 크게 설정
cv2.resizeWindow("4_Processed Frame", 640, 480)
cv2.resizeWindow("1_Frame", 640, 480)
# 서보 모터 트랙바
cv2.createTrackbar("Servo_1_Angle", "Camera Settings", DEFAULT_SERVO_1, 180, nothing)
cv2.createTrackbar("Servo_2_Angle", "Camera Settings", DEFAULT_SERVO_2, 110, nothing)
# 이미지 처리 트랙바 (공백 제거하여 안정성 향상)
cv2.createTrackbar("ROI_Top_Y", "Camera Settings", 871, 1000, nothing)
cv2.createTrackbar("ROI_Bottom_Y", "Camera Settings", 946, 1000, nothing)
cv2.createTrackbar(
"Direction_Threshold",
"Camera Settings",
DEFAULT_DIRECTION_THRESHOLD,
500000,
nothing,
)
cv2.createTrackbar(
"Up_Threshold", "Camera Settings", DEFAULT_UP_THRESHOLD, 500000, nothing
)
cv2.createTrackbar("Brightness", "Camera Settings", DEFAULT_BRIGHTNESS, 100, nothing)
cv2.createTrackbar("Contrast", "Camera Settings", DEFAULT_CONTRAST, 100, nothing)
cv2.createTrackbar(
"Detect_Value", "Camera Settings", DEFAULT_DETECT_VALUE, 150, nothing
)
cv2.createTrackbar("Motor_Up_Speed", "Camera Settings", DEFAULT_SPEED_UP, 255, nothing)
cv2.createTrackbar(
"Motor_Down_Speed", "Camera Settings", DEFAULT_SPEED_DOWN, 255, nothing
)
cv2.createTrackbar("Saturation", "Camera Settings", 0, 100, nothing)
cv2.createTrackbar("Gain", "Camera Settings", 0, 100, nothing)
print("Trackbars and windows configured successfully\n")
# ============================
# 4단계: 이미지 처리 함수 정의
# ============================
print("=" * 50)
print(" STEP 5: Defining Image Processing Functions")
print("=" * 50)
def apply_roi_visualization(frame, pts_src, actual_w, actual_h, top_y, bottom_y):
"""ROI 영역 시각화"""
pts = pts_src.reshape((-1, 1, 2)).astype(np.int32)
frame_with_rect = cv2.polylines(
frame.copy(), [pts], isClosed=True, color=(0, 255, 0), thickness=2
)
cv2.putText(
frame_with_rect,
f"Resolution: {actual_w}x{actual_h}",
(10, 20),
cv2.FONT_HERSHEY_SIMPLEX,
0.5,
(0, 255, 255),
1,
)
cv2.putText(
frame_with_rect,
f"ROI Top: {top_y} / Bottom: {bottom_y}",
(10, 40),
cv2.FONT_HERSHEY_SIMPLEX,
0.5,
(0, 255, 255),
1,
)
return frame_with_rect
def calculate_roi_points(actual_w, actual_h, roi_top_y, roi_bottom_y):
"""ROI 포인트 계산"""
top_y = int(roi_top_y * actual_h / 1000)
bottom_y = int(roi_bottom_y * actual_h / 1000)
top_y = max(0, min(top_y, actual_h - 1))
bottom_y = max(0, min(bottom_y, actual_h - 1))
if top_y >= bottom_y:
top_y = max(0, bottom_y - 50)
margin = 10
pts_src = np.float32(
[
[margin, bottom_y],
[actual_w - margin, bottom_y],
[actual_w - margin, top_y],
[margin, top_y],
]
)
return pts_src, top_y, bottom_y
def apply_perspective_transform(frame, pts_src, target_w=320, target_h=240):
"""원근 변환 적용"""
pts_dst = np.float32([[0, target_h], [target_w, target_h], [target_w, 0], [0, 0]])
mat_affine = cv2.getPerspectiveTransform(pts_src, pts_dst)
frame_transformed = cv2.warpPerspective(frame, mat_affine, (target_w, target_h))
return frame_transformed
def detect_road_lines(color_frame, gray_frame, detect_value):
"""
도로선 감지 (빨간색 + 엷은 회색)
처리 방식:
1. HSV 변환하여 빨간색 범위 감지
2. 밝기로 엷은 회색(흰색 계열) 감지
3. 두 마스크 결합
4. 노이즈 제거
결과:
- 빨간색/회색 도로선: 255 (흰색)
- 검정색 도로/장애물: 0 (검정)
히스토그램 해석:
- 합이 클수록 = 도로선이 많음 = 막힘 또는 경계
- 합이 작을수록 = 검정 도로가 많음 = 주행 가능
"""
# HSV 변환 (빨간색 감지를 위해)
hsv_frame = cv2.cvtColor(color_frame, cv2.COLOR_BGR2HSV)
# 빨간색 범위 감지 (HSV에서 빨간색은 0도 근처와 180도 근처 두 영역)
# 빨간색 범위 1: 0-10도
lower_red1 = np.array([0, 70, 50])
upper_red1 = np.array([10, 255, 255])
mask_red1 = cv2.inRange(hsv_frame, lower_red1, upper_red1)
# 빨간색 범위 2: 170-180도
lower_red2 = np.array([170, 70, 50])
upper_red2 = np.array([180, 255, 255])
mask_red2 = cv2.inRange(hsv_frame, lower_red2, upper_red2)
# 두 빨간색 마스크 결합
mask_red = cv2.bitwise_or(mask_red1, mask_red2)
# 엷은 회색/흰색 감지 (밝기 기준)
# detect_value를 기준으로 밝은 영역 감지 (범위를 더 넓게)
# 검정색 반사 부분도 포함하기 위해 임계값을 낮춤
threshold_gray = max(detect_value - 30, 80) # 범위 확장
_, mask_gray = cv2.threshold(gray_frame, threshold_gray, 255, cv2.THRESH_BINARY)
# 너무 어두운 부분(검정 도로)은 제외
dark_threshold = 50 # 50 이하는 확실한 검정 도로
_, mask_dark = cv2.threshold(gray_frame, dark_threshold, 255, cv2.THRESH_BINARY)
mask_gray = cv2.bitwise_and(mask_gray, mask_dark)
# 빨간색과 회색 마스크 결합
mask_lines = cv2.bitwise_or(mask_red, mask_gray)
# 노이즈 제거
kernel = np.ones((3, 3), np.uint8)
mask_lines = cv2.morphologyEx(mask_lines, cv2.MORPH_CLOSE, kernel)
mask_lines = cv2.morphologyEx(mask_lines, cv2.MORPH_OPEN, kernel)
return mask_lines
def apply_binary_threshold(gray_frame, detect_value):
"""
기본 이진화 (호환성을 위해 유지)
실제로는 detect_road_lines 사용 권장
"""
_, binary_frame = cv2.threshold(gray_frame, detect_value, 255, cv2.THRESH_BINARY)
kernel = np.ones((5, 5), np.uint8)
binary_frame = cv2.morphologyEx(binary_frame, cv2.MORPH_CLOSE, kernel)
binary_frame = cv2.morphologyEx(binary_frame, cv2.MORPH_OPEN, kernel)
return binary_frame
def visualize_direction_on_frame(
binary_frame, direction, left_sum, center_sum, right_sum
):
"""
프레임에 방향 정보 시각화 (3등분 방식)
Args:
binary_frame: 이진화된 프레임
direction: 결정된 방향 (LEFT/UP/RIGHT)
left_sum: 좌측 영역 히스토그램 합
center_sum: 중앙 영역 히스토그램 합
right_sum: 우측 영역 히스토그램 합
시각화 요소:
- 방향 표시 (DIR: LEFT/UP/RIGHT)
- 히스토그램 합계 (작을수록 도로 많음)
- 3등분 영역 구분선 및 라벨
"""
# 컬러 이미지로 변환 (텍스트 표시를 위해)
frame_color = cv2.cvtColor(binary_frame, cv2.COLOR_GRAY2BGR)
h, w = frame_color.shape[:2]
# 방향 텍스트 배경
overlay = frame_color.copy()
cv2.rectangle(overlay, (0, 0), (w, 90), (0, 0, 0), -1)
cv2.addWeighted(overlay, 0.7, frame_color, 0.3, 0, frame_color)
# 방향 텍스트 표시
direction_text = f"DIR: {direction}"
direction_color = (0, 255, 0) if direction == "UP" else (0, 255, 255)
cv2.putText(
frame_color,
direction_text,
(10, 30),
cv2.FONT_HERSHEY_SIMPLEX,
1.0,
direction_color,
2,
)
# 히스토그램 값 표시
hist_text = f"L:{left_sum:7d} C:{center_sum:7d} R:{right_sum:7d}"
cv2.putText(
frame_color,
hist_text,
(10, 60),
cv2.FONT_HERSHEY_SIMPLEX,
0.45,
(255, 255, 255),
1,
)
# 비율 표시 (작을수록 주행 가능)
height_in_frame = binary_frame.shape[0]
max_possible = height_in_frame * 255
left_ratio = left_sum / (max_possible / 3)
center_ratio = center_sum / (max_possible / 3)
right_ratio = right_sum / (max_possible / 3)
ratio_text = (
f"Ratio(Low=OK) - L:{left_ratio:.2f} C:{center_ratio:.2f} R:{right_ratio:.2f}"
)
cv2.putText(
frame_color,
ratio_text,
(10, 80),
cv2.FONT_HERSHEY_SIMPLEX,
0.4,
(200, 200, 200),
1,
)
# 도로선 감지 설명
cv2.putText(
frame_color,
"White=RoadLine(Red/Gray) Black=Road",
(10, 100),
cv2.FONT_HERSHEY_SIMPLEX,
0.35,
(150, 150, 150),
1,
)
# 3등분 구분선 표시
left_line = w // 3
right_line = 2 * w // 3
# 왼쪽 구분선 (파란색)
cv2.line(frame_color, (left_line, 0), (left_line, h), (255, 0, 0), 2)
# 오른쪽 구분선 (파란색)
cv2.line(frame_color, (right_line, 0), (right_line, h), (255, 0, 0), 2)
# LEFT/CENTER/RIGHT 라벨 (하단)
label_y = h - 10
cv2.putText(
frame_color,
"LEFT",
(w // 6 - 20, label_y),
cv2.FONT_HERSHEY_SIMPLEX,
0.6,
(255, 255, 0),
2,
)
cv2.putText(
frame_color,
"CENTER",
(w // 2 - 35, label_y),
cv2.FONT_HERSHEY_SIMPLEX,
0.6,
(0, 255, 0),
2,
)
cv2.putText(
frame_color,
"RIGHT",
(5 * w // 6 - 25, label_y),
cv2.FONT_HERSHEY_SIMPLEX,
0.6,
(255, 255, 0),
2,
)
return frame_color
def process_frame(frame, detect_value, roi_top_y, roi_bottom_y):
"""
프레임 처리 및 도로선 검출
처리 단계:
1. 실제 해상도 확인 및 ROI 계산
2. ROI 영역 시각화
3. 원근 변환 적용
4. 그레이스케일 변환
5. 도로선 감지 (빨간색 + 엷은 회색)
"""
# 1. 실제 해상도 확인 및 ROI 계산
actual_h, actual_w = frame.shape[:2]
pts_src, top_y, bottom_y = calculate_roi_points(
actual_w, actual_h, roi_top_y, roi_bottom_y
)
# 2. ROI 영역 시각화
frame_with_rect = apply_roi_visualization(
frame, pts_src, actual_w, actual_h, top_y, bottom_y
)
cv2.imshow("1_Frame", frame_with_rect)
# 3. 원근 변환 적용
frame_transformed = apply_perspective_transform(frame, pts_src)
cv2.imshow("2_frame_transformed", frame_transformed)
# 4. 그레이스케일 변환 (참고용)
gray_frame = cv2.cvtColor(frame_transformed, cv2.COLOR_BGR2GRAY)
cv2.imshow("3_gray_frame", gray_frame)
# 5. 도로선 감지 (빨간색 + 엷은 회색)
binary_frame = detect_road_lines(frame_transformed, gray_frame, detect_value)
cv2.imshow("4_Processed Frame", binary_frame)
return binary_frame
print("Image processing functions defined successfully\n")
# ============================
# 5단계: 차량 제어 함수 정의
# ============================
print("=" * 50)
print(" STEP 6: Defining Car Control Functions")
print("=" * 50)
def set_motor_speeds(motor_0, motor_1, motor_2, motor_3):
"""모터 속도 설정"""
bot.Ctrl_Muto(0, motor_0)
bot.Ctrl_Muto(1, motor_1)
bot.Ctrl_Muto(2, motor_2)
bot.Ctrl_Muto(3, motor_3)
def car_run(speed_left, speed_right):
"""전진"""
set_motor_speeds(speed_left, speed_left, speed_right, speed_right)
def car_stop():
"""정지"""
set_motor_speeds(0, 0, 0, 0)
def car_left(speed_left, speed_right):
"""좌회전 (제자리 회전)"""
set_motor_speeds(-speed_left, -speed_left, speed_right, speed_right)
def car_right(speed_left, speed_right):
"""우회전 (제자리 회전)"""
set_motor_speeds(speed_left, speed_left, -speed_right, -speed_right)
def set_led_effect(mode):
"""LED 효과 설정"""
if not USE_LED_EFFECTS:
return
bot.Ctrl_WQ2812_ALL(1, mode)
def log_car_action(action_name, speed=None):
"""차량 동작 로그 출력"""
if not DEBUG_MODE:
return
if speed:
print(f"{action_name} - Speed: {speed}")
else:
print(action_name)
def control_car(direction, up_speed, down_speed):
"""차량 제어 메인 함수"""
if direction == "UP":
car_run(up_speed, up_speed)
log_car_action("FORWARD", up_speed)
set_led_effect(1)
elif direction == "LEFT":
car_left(down_speed, up_speed)
log_car_action("TURN LEFT")
set_led_effect(3)
elif direction == "RIGHT":
car_right(up_speed, down_speed)
log_car_action("TURN RIGHT")
set_led_effect(3)
print("Car control functions defined successfully\n")
# ============================
# 6단계: 서보 모터 제어 함수 정의
# ============================
print("=" * 50)
print(" STEP 7: Defining Servo Motor Control Functions")
print("=" * 50)
def rotate_servo(servo_id, angle):
"""
서보 모터 회전
단계:
1. Servo 2 각도 제한 확인 (최대 110도)
2. 서보 모터 제어
"""
if servo_id == 2 and angle > 110:
angle = 110
bot.Ctrl_Servo(servo_id, angle)
print("Servo motor control functions defined successfully\n")
# ============================
# 7단계: 방향 결정 함수 정의
# ============================
print("=" * 50)
print(" STEP 8: Defining Direction Decision Functions")
print("=" * 50)
def analyze_histogram(histogram):
"""
히스토그램 3등분 분석
분할 방식:
- LEFT: 0% ~ 33% (왼쪽 1/3)
- CENTER: 33% ~ 66% (중앙 1/3)
- RIGHT: 66% ~ 100% (오른쪽 1/3)
이진화 값 (도로선 감지):
- 검정색 도로 = 0 (주행 가능 영역)
- 빨간색/회색 도로선 = 255 (경계/막힘)
히스토그램 합산 해석:
- 합이 작을수록 = 검정 도로가 많음 = 주행 가능 영역
- 합이 클수록 = 도로선이 많음 = 경계/막힘
반비례 관계:
- ratio가 낮을수록 = 주행 가능
- ratio가 높을수록 = 막힘
"""
length = len(histogram)
# 3등분 경계
left_end = length // 3
right_start = 2 * length // 3
# 각 영역의 히스토그램 합계
left_sum = int(np.sum(histogram[:left_end]))
center_sum = int(np.sum(histogram[left_end:right_start]))
right_sum = int(np.sum(histogram[right_start:]))
# 정규화 (0~1 범위로 변환하여 비율 계산)
left_ratio = left_sum / (left_end * 255) if left_end > 0 else 0
center_ratio = (
center_sum / ((right_start - left_end) * 255)
if (right_start - left_end) > 0
else 0
)
right_ratio = (
right_sum / ((length - right_start) * 255) if (length - right_start) > 0 else 0
)
return left_sum, center_sum, right_sum, left_ratio, center_ratio, right_ratio
def decide_direction(
histogram, direction_threshold, up_threshold, detect_value, roi_top_y, roi_bottom_y
):
"""
히스토그램 기반 방향 결정 (3등분 분석 - 도로선 감지)
처리 단계:
1. 히스토그램 3등분 분석 (LEFT, CENTER, RIGHT)
2. 좌우 영역 비교하여 도로 방향 판단
3. 좌우 차이가 크면 해당 방향으로 회전
4. 막다른 길 감지 시 랜덤 방향 선택
5. 그 외 직진
로직 (도로선 감지 모드):
- 합이 작음 = 검정 도로 많음 = 주행 가능 (도로선 적음)
- 합이 큼 = 도로선 많음 = 경계/막힘 (빨간색/회색선)
- left_sum < right_sum → 왼쪽에 도로선 적음 → LEFT 회전 가능
- right_sum < left_sum → 오른쪽에 도로선 적음 → RIGHT 회전 가능
- center_ratio > 0.7 → 중앙에 도로선 많음 → 막다른 길 → 랜덤 선택
Returns:
tuple: (direction, left_sum, center_sum, right_sum) - 방향과 히스토그램 분석값
NOTE: 서보 모터를 활용한 대체 경로 탐색 기능은 교육생들이 직접 구현해야 합니다.
"""
# 1. 히스토그램 3등분 분석
left_sum, center_sum, right_sum, left_ratio, center_ratio, right_ratio = (
analyze_histogram(histogram)
)
if DEBUG_MODE:
print(f"Histogram Analysis (Road Line Detection):")
print(
f" LEFT: {left_sum:7d} (ratio: {left_ratio:.3f}) - Lower = More drivable"
)
print(
f" CENTER: {center_sum:7d} (ratio: {center_ratio:.3f}) - Lower = More drivable"
)
print(
f" RIGHT: {right_sum:7d} (ratio: {right_ratio:.3f}) - Lower = More drivable"
)
print(
f" L-R Diff: {right_sum - left_sum:7d} | Threshold: {direction_threshold}"
)
# 2. 좌우 차이가 크면 회전
# right_sum이 크면 = 오른쪽에 도로선 많음 = 왼쪽으로 회전
# left_sum이 크면 = 왼쪽에 도로선 많음 = 오른쪽으로 회전
if abs(right_sum - left_sum) > direction_threshold:
if right_sum > left_sum:
# 오른쪽에 도로선이 많음 = 왼쪽이 더 주행 가능
direction = "LEFT"
else:
# 왼쪽에 도로선이 많음 = 오른쪽이 더 주행 가능
direction = "RIGHT"
if DEBUG_MODE:
print(f"Decision: Turn {direction} (less road lines on that side)")
if USE_BEEP and BEEP_ON_TURN:
bot.Ctrl_BEEP_Switch(1)
time.sleep(0.05)
bot.Ctrl_BEEP_Switch(0)
return direction, left_sum, center_sum, right_sum
# 3. 막다른 길 감지 (center_ratio가 높으면 중앙에 도로선이 많음 = 막힘)
if center_ratio > 0.7: # 70% 이상이 도로선이면 막다른 길
if DEBUG_MODE:
print("Dead end detected! Center has too many road lines.")
print("Choosing random direction (LEFT or RIGHT)...")
# 차량 잠시 정지
car_stop()
time.sleep(0.3)
# 랜덤으로 LEFT 또는 RIGHT 선택
random_direction = random.choice(["LEFT", "RIGHT"])
if DEBUG_MODE:
print(f"Random direction selected: {random_direction}")
# 부저로 막다른 길 알림
if USE_BEEP:
bot.Ctrl_BEEP_Switch(1)
time.sleep(0.1)
bot.Ctrl_BEEP_Switch(0)
time.sleep(0.1)
bot.Ctrl_BEEP_Switch(1)
time.sleep(0.1)
bot.Ctrl_BEEP_Switch(0)
return random_direction, left_sum, center_sum, right_sum
# 4. 직진 (중앙에 검정 도로가 있음)
if DEBUG_MODE:
print("Decision: Go straight (CENTER path has black road)")
return "UP", left_sum, center_sum, right_sum
print("Direction decision functions defined successfully\n")
# ============================
# 보조 함수 정의
# ============================
print("=" * 50)
print(" Defining Helper Functions")
print("=" * 50)
def handle_keyboard_input(led_state):
"""
키보드 입력 처리
Returns:
led_state: 현재 LED 상태 (None이면 종료)
"""
key = cv2.waitKey(30) & 0xFF
# ESC: 종료
if key == 27:
print("\nExiting...")
return None
# SPACE: 일시정지
elif key == 32:
print("\nPaused. Press any key to continue.")
car_stop()
cv2.waitKey()
# 'l': LED 토글
elif key == ord("l"):
led_state = not led_state
if led_state:
bot.Ctrl_WQ2812_ALL(1, 2)
print("LED ON")
else:
bot.Ctrl_WQ2812_ALL(0, 0)
print("LED OFF")
# 'b': 부저 테스트
elif key == ord("b"):
print("Beep!")
bot.Ctrl_BEEP_Switch(1)
time.sleep(0.1)
bot.Ctrl_BEEP_Switch(0)
return led_state
def read_trackbar_values():
"""트랙바 값 일괄 읽기"""
values = {
"brightness": cv2.getTrackbarPos("Brightness", "Camera Settings"),
"contrast": cv2.getTrackbarPos("Contrast", "Camera Settings"),
"saturation": cv2.getTrackbarPos("Saturation", "Camera Settings"),
"gain": cv2.getTrackbarPos("Gain", "Camera Settings"),
"detect_value": cv2.getTrackbarPos("Detect_Value", "Camera Settings"),
"motor_up_speed": cv2.getTrackbarPos("Motor_Up_Speed", "Camera Settings"),
"motor_down_speed": cv2.getTrackbarPos("Motor_Down_Speed", "Camera Settings"),
"servo_1_angle": cv2.getTrackbarPos("Servo_1_Angle", "Camera Settings"),
"servo_2_angle": cv2.getTrackbarPos("Servo_2_Angle", "Camera Settings"),
"roi_top_y": cv2.getTrackbarPos("ROI_Top_Y", "Camera Settings"),
"roi_bottom_y": cv2.getTrackbarPos("ROI_Bottom_Y", "Camera Settings"),
"direction_threshold": cv2.getTrackbarPos(
"Direction_Threshold", "Camera Settings"
),
"up_threshold": cv2.getTrackbarPos("Up_Threshold", "Camera Settings"),
}
return values
def apply_camera_settings(cap, brightness, contrast, saturation, gain):
"""카메라 속성 설정"""
cap.set(cv2.CAP_PROP_BRIGHTNESS, brightness)
cap.set(cv2.CAP_PROP_CONTRAST, contrast)
cap.set(cv2.CAP_PROP_SATURATION, saturation)
cap.set(cv2.CAP_PROP_GAIN, gain)
def cleanup_and_exit(bot, cap):
"""정리 및 종료"""
print("\n" + "=" * 50)
print(" STEP 10: Cleaning up and Exiting")
print("=" * 50)
car_stop()
print("Motors stopped")
if USE_LED_EFFECTS:
bot.Ctrl_WQ2812_ALL(0, 0)
print("LED turned off")
bot.Ctrl_BEEP_Switch(0)
bot.Ctrl_Servo(1, 90)
bot.Ctrl_Servo(2, 25)
print("Servo motors returned to initial position")
cap.release()
cv2.destroyAllWindows()
print("Camera released")
del bot
print("Raspbot object deleted")
print("\nCleanup completed successfully!")
print("Helper functions defined successfully\n")
# ============================
# 8단계: 메인 루프 실행
# ============================
print("=" * 50)
print(" STEP 9: Starting Main Loop")
print("=" * 50)
print("Controls:")
print(" ESC : Exit")
print(" SPACE : Pause")
print(" 'l' : Toggle LED")
print(" 'b' : Test Beeper")
print("=" * 50)
frame_count = 0
start_time = time.time()
led_state = LED_ON_START
try:
while True:
frame_count += 1
# 트랙바 값 읽기
params = read_trackbar_values()
# 카메라 속성 설정
apply_camera_settings(
cap,
params["brightness"],
params["contrast"],
params["saturation"],
params["gain"],
)
# 프레임 읽기
ret, frame = cap.read()
if not ret:
print("Cannot read frame from camera.")
break
# 서보 모터 각도 조절
rotate_servo(1, params["servo_1_angle"])
rotate_servo(2, params["servo_2_angle"])
# 프레임 처리
processed_frame = process_frame(
frame, params["detect_value"], params["roi_top_y"], params["roi_bottom_y"]
)
histogram = np.sum(processed_frame, axis=0)
# 방향 결정 및 제어
if DEBUG_MODE:
print(f"\n--- Frame {frame_count} ---")
direction, hist_left, hist_center, hist_right = decide_direction(
histogram,
params["direction_threshold"],
params["up_threshold"],
params["detect_value"],
params["roi_top_y"],
params["roi_bottom_y"],
)
# 방향 정보 시각화
processed_frame_visual = visualize_direction_on_frame(
processed_frame, direction, hist_left, hist_center, hist_right
)
cv2.imshow("4_Processed Frame", processed_frame_visual)
control_car(direction, params["motor_up_speed"], params["motor_down_speed"])
# FPS 계산
if frame_count % 10 == 0:
elapsed = time.time() - start_time
fps = 10 / elapsed
if DEBUG_MODE:
print(f"FPS: {fps:.1f}")
start_time = time.time()
# 키 입력 처리
led_state = handle_keyboard_input(led_state)
if led_state is None:
break
time.sleep(0.05)
except KeyboardInterrupt:
print("\nInterrupted by user")
except Exception as e:
print(f"\nError occurred: {e}")
import traceback
traceback.print_exc()
# ============================
# 9단계: 정리 및 종료
# ============================
finally:
cleanup_and_exit(bot, cap)
나의 코드 | 파라미터 수정 및 실행 가이드
파라미터 수정 위치
configs/phase1_pid.yaml ← 여기서 모든 파라미터 수정
주요 디렉토리 구조
hardware: # 하드웨어 설정 (LED, 부저, 서보, 카메라)
perception: # 인지 설정 (ROI, 도로선 감지 임계값)
control: # 제어 설정 (속도, PID 게인)
runtime: # 실행 설정 (디버그, 윈도우 표시)
실행 명령어
기본 실행 (실제 로봇 구동)
python3 scripts/run_phase1.py
개발/테스트 모드 (하드웨어 없이)
python3 scripts/run_phase1.py --mock-hw # 실제 차량 작동x, 터미널에 로그만 출력
커스텀 설정 파일 사용
python3 scripts/run_phase1.py --config configs/my_config.yaml
폴더 구조 (핵심만)
P_project/
├── configs/
│ └── phase1_pid.yaml ← 파라미터 수정 여기
│
├── scripts/
│ └── run_phase1.py ← 실행 스크립트
│
└── raspbot/ ← 모듈화 코드
├── hardware/ # 하드웨어 제어
├── perception/ # 영상 처리
├── control/ # PID 제어
├── runtime/ # 실행 로직
└── utils/ # 유틸리티
요약
- 파라미터 수정:
configs/phase1_pid.yaml편집 - 실행:
python3 scripts/run_phase1.py - 테스트:
python3 scripts/run_phase1.py --mock-hw- 모든 설정은
configs/phase1_pid.yaml에서 관리
- 모든 설정은
전체 디렉토리 구조
전체 디렉토리 구조
P_project/
├── 0_autoplot___test.py # 원본 테스트 코드 (참고용)
├── Readme.md # 프로젝트 설명서
│
├── configs/ # 설정 파일
│ └── phase1_pid.yaml # PID 제어 파라미터 (속도, PID 게인 등)
│
├── scripts/ # 실행 스크립트
│ └── run_phase1.py # Phase1 실행 스크립트 (메인 진입점)
│
├── raspbot/ # 핵심 모듈 코드
│ ├── hardware/ # 하드웨어 제어
│ │ ├── raspbot.py # Raspbot 하드웨어 래퍼 (모터, LED, 부저, 서보)
│ │ └── camera.py # 카메라 제어
│ │
│ ├── perception/ # 인지/영상 처리
│ │ ├── preprocessing.py # ROI 추출, 원근 변환
│ │ ├── lane_detection.py # 도로선 감지, 히스토그램 분석
│ │ └── visualization.py # 디버그 시각화
│ │
│ ├── control/ # 제어 로직
│ │ ├── pid.py # PID 컨트롤러
│ │ └── vehicle_controller.py # 차량 제어 (속도, 방향)
│ │
│ ├── planning/ # 경로 계획 (현재 비어있음, 향후 확장용)
│ │
│ ├── runtime/ # 실행 런타임
│ │ └── phase1_baseline.py # Phase1 메인 로직 (인지→제어 루프)
│ │
│ └── utils/ # 유틸리티
│ ├── config_loader.py # YAML 설정 파일 로더
│ └── timing.py # FPS 측정 타이머
│
├── data/ # 데이터 저장
│ ├── raw/ # 원본 영상/데이터
│ └── processed/ # 처리된 데이터
│
└── models/ # 학습 모델 저장
└── yolo/ # YOLO 모델 (향후 사용)
폴더별 역할 및 사용 시점
| 폴더 | 역할 | 언제 사용? |
|---|---|---|
configs/ |
파라미터 설정 | 속도, PID 게인, ROI 등 조정 시 |
scripts/ |
실행 진입점 | 로봇 구동 시 (python3 run_phase1.py) |
raspbot/hardware/ |
하드웨어 제어 | 모터/LED/부저/서보/카메라 제어 필요 시 |
raspbot/perception/ |
영상 처리 | 도로선 감지 알고리즘 수정 시 |
raspbot/control/ |
제어 로직 | PID 튜닝, 차량 제어 로직 변경 시 |
raspbot/runtime/ |
실행 로직 | 메인 루프 수정 시 |
raspbot/utils/ |
유틸리티 | 공통 기능 추가 시 |
data/ |
데이터 저장 | 영상/데이터 저장/로드 시 |
models/ |
모델 저장 | 학습된 모델 저장 시 |
핵심 폴더 3개
configs/- 파라미터 수정scripts/- 실행raspbot/- 코드 모듈- 나머지는 데이터 저장/분석/테스트용
실행 흐름
1. scripts/run_phase1.py 실행
↓
2. configs/phase1_pid.yaml 로드
↓
3. raspbot/runtime/phase1_baseline.py 메인 루프
↓
4. raspbot/perception/ → 영상 처리
↓
5. raspbot/control/ → 제어 결정
↓
6. raspbot/hardware/ → 실제 하드웨어 제어
인지 부분 요약
원본 프레임
↓
`calculate_roi_points()` → ROI 좌표 계산
↓
`apply_roi_overlay()` → ROI 박스만 시각화(디버그용)
↓
`warp_perspective()` → ROI 기준 버드아이뷰(IPM) 변환
↓
그레이스케일 변환
↓
`detect_road_lines()` → 차선 이진화(Hue 빨간선 + 그레이 임계)
↓
`compute_lane_error()` → 도로 무게중심 x 좌표 계산(센트로이드)
↓
`estimate_heading()` → 밴드별 중심(P1~P3)으로 기울기/오프셋 계산
↓
`visualize_binary_debug()` → DIR/FPS/steer/heading/턴 임계, P1~P3, 센트로이드(노란선) 표시
슬라이더 파라미터 설명 (값 증가 시 효과 포함)
roi_top: ROI 영역 상단 위치 (0~1000 스케일) - 증가 시 ROI 영역 축소 (멀리 보기)roi_bottom: ROI 영역 하단 위치 (0~1000 스케일) - 증가 시 ROI 영역 축소detect_value: 도로선 감지 밝기 임계값 (0~255) - 증가 시 도로선 감지 어려움 (밝은 영역만)pid_kp_x100: PID 비례 게인 × 100 (반응 속도) - 증가 시 빠른 반응, 진동 가능pid_ki_x100: PID 적분 게인 × 100 (누적 오차 보정) - 증가 시 누적 오차 보정 강화 (권장: 0 유지)pid_kd_x100: PID 미분 게인 × 100 (진동 억제) - 증가 시 진동 억제 강화, 반응 지연 가능base_speed: 직진 기본 속도 (0~255) - 증가 시 전체 속도 증가steer_scale_x100: 조향 스케일 배율 × 100 (조향 민감도) - 증가 시 조향 강도 증가turn_slope_thr_x100: 회전 감지 기울기 임계값 × 100 (주황선 기울기 기준) - 증가 시 회전 감지 늦어짐 (안정적)turn_offset_thr_x100: 회전 감지 오프셋 임계값 × 100 (주황선 상단 위치 기준) - 증가 시 회전 감지 늦어짐 (안정적)turn_speed_scale_x100: 회전 시 속도 감소 비율 × 100 (0.5 = 50% 속도) - 증가 시 회전 시 속도 증가 (빠른 회전)turn_steer_scale_x100: 회전 시 조향 스케일 배율 × 100 (회전 시 조향 강도) - 증가 시 회전 시 조향 강화heading_smooth_x100: 주황선 EMA 필터링 강도 × 100 (부드러움/반응 속도) - 증가 시 빠른 반응, 노이즈 증가 가능brightness: 카메라 밝기 (0~200) - 증가 시 영상 밝아짐contrast: 카메라 대비 (0~200) - 증가 시 대비 강화saturation: 카메라 채도 (0~200) - 증가 시 색상 진함exposure: 카메라 노출 (0~300) - 증가 시 노출 증가 (밝아짐)gain: 카메라 게인 (0~200) - 증가 시 게인 증가 (밝아짐, 노이즈 증가 가능)servo1_yaw: 서보1 좌우 각도 (0~180도) - 증가 시 오른쪽으로 회전servo2_pitch: 서보2 상하 각도 (0~110도) - 증가 시 위쪽으로 회전
전체 코드 플로우
전체 코드 플로우
<인지 영역>
원본 프레임 (Camera.read())
↓
calculate_roi_points() → ROI 좌표 (pts_src)
↓
apply_roi_overlay() → ROI 박스 오버레이(디버그용)
↓
warp_perspective() → 버드아이뷰 변환
↓
그레이스케일 변환
↓
detect_road_lines() → 이진 이미지 (binary)
↓
compute_lane_error() → 도로 무게중심 x 좌표(센트로이드, 시각화용)
↓
estimate_heading(binary)
├─ 여러 높이 구간에서 도로 중심 추정
├─ 가중 평균으로 상단 중심 계산
├─ slope_norm: 기울기 (-1~1)
└─ heading_offset: 상단 오프셋 (-1~1)
↓ <제어 영역>
┌─────────────────────────────────────┐
│ Heading 스무딩 (EMA) │
│ heading_prev = α * heading_offset + │
│ (1-α) * heading_prev │
│ heading_used = heading_prev │
└─────────────────────────────────────┘
↓
┌─────────────────────────────────────┐
│ PD 제어기 │
│ 입력: heading_used │
│ P: kp * heading_used │
│ I: ki * integral │
│ D: kd * derivative │
│ 출력: steering_output (제한 적용) │
└─────────────────────────────────────┘
↓
┌─────────────────────────────────────┐
│ 상태 판별 │
│ 입력: │
│ - heading_used │
│ - slope_norm │
│ - turn_slope_thresh │
│ - turn_offset_thresh │
│ │
│ 판별 로직: │
│ if heading_used == None: │
│ → LOST │
│ elif (|slope_norm| > thr OR │
│ |heading_used| > thr): │
│ → TURN_LEFT/RIGHT │
│ else: │
│ → STRAIGHT │
└─────────────────────────────────────┘
↓
┌──────────────────────────────────────┐
│ 상태별 파라미터 조정 │
│ 입력: state │
│ │
│ if TURN: │
│ effective_speed = base_speed * │
│ turn_speed_scale │
│ effective_steer_scale = │
│ steer_scale * turn_steer_scale │
│ else: │
│ effective_speed = base_speed │
│ effective_steer_scale = steer_scale│
└──────────────────────────────────────┘
↓
┌─────────────────────────────────────┐
│ VehicleController.drive() │
│ 입력: │
│ - steering_output │
│ - effective_speed │
│ - effective_steer_scale │
│ │
│ 처리: │
│ steer = steering_output * │
│ effective_steer_scale │
│ left_speed = effective_speed + │
│ steer │
│ right_speed = effective_speed - │
│ steer │
│ (데드밴드/클램프 적용) │
└─────────────────────────────────────┘
↓
┌─────────────────────────────────────┐
│ RaspbotHardware.drive() │
│ 입력: left_speed, right_speed │
│ │
│ set_motor_speeds( │
│ left, left, right, right) │
│ │
│ Ctrl_Muto(0, left) # 전좌 │
│ Ctrl_Muto(1, left) # 후좌 │
│ Ctrl_Muto(2, right) # 전우 │
│ Ctrl_Muto(3, right) # 후우 │
└─────────────────────────────────────┘
↓
모터 출력 (4채널)
조향 로직(중요)
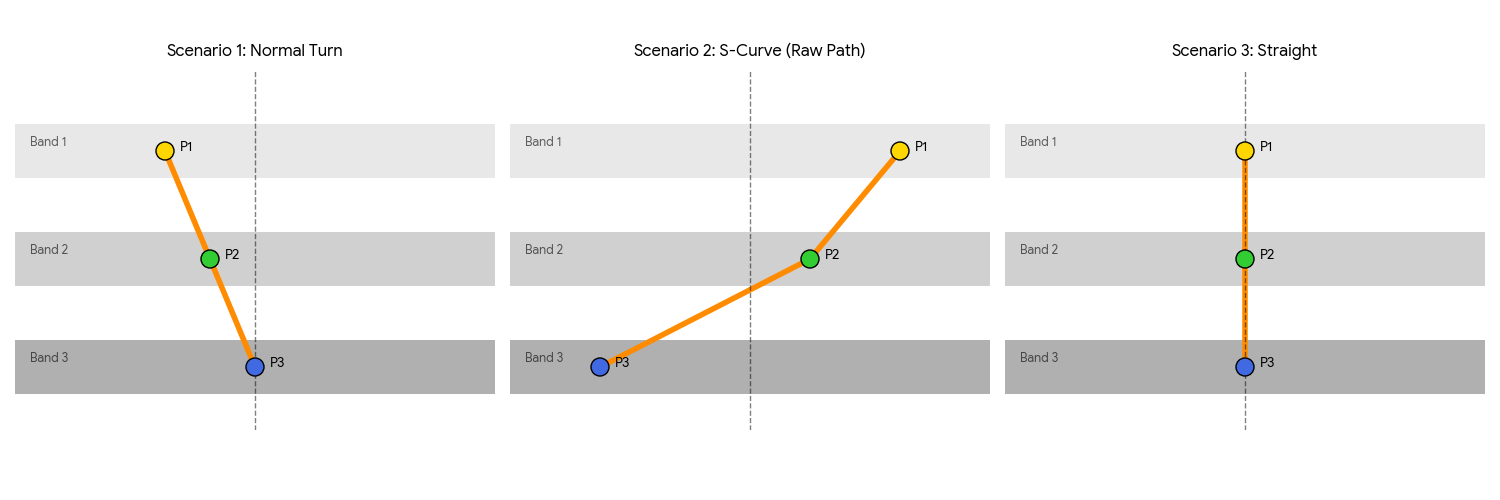
1.
- 화면을 3등분 하여 3가지의 밴드 영역을 나눈다.
- Band1 : 15~30%
- Band2: 45~60%
- Band3: 75~90%
- P1, P2, P3는 각 밴드의 검정 영역(주행 해야하는 도로 바닥)의 도심이다. P1이 가장 먼 지점이다.
- 도로 정보를 거리에 따라 얻을 때 이미지 처리량을 줄이기 위해서 일부만 반영했다.
- 도심은 아래와 같이 구한다.
-
각 밴드에서 도로(검정 영역) 도심(k=1,2,3)
\[c_{x,k} = \dfrac{m_{10}}{m_{00}}, \quad c_{y,k} = \dfrac{y_0 + y_1}{2}\] -
중앙선 기준 정규화 오프셋
\[o_k = \dfrac{c_{x,k} - w/2}{\,w/2\,} \in [-1, 1]\] - (왼쪽이면 음수, 오른쪽이면 양수로 직관적)
- 해상도와 ROI와 무관한
-1~1범위로 제어 파라미터를 단순화했다.
-
2.
- 가중 상단 중심과 기울기는 아래와 같이 구한다.
- 기본 가중치 w=(1.8,1.5,0.9) (P1, P2, P3 순)
- 먼 곳에 가중치를 높게 주어 더 빠른 반응과 회전을 가능하게 했다.
- 상충시(반대 방향) 처리:
시험 주행 중 조향이 정상적으로 작동하지 않는 문제가 발생했다.
P1과 P2가 벽 너머의 반대편 도로나 지형을 감지해서 오류가 난 상황이므로 아직 가까운 거리의 도로를 보고 있을 P3의 값을 반영하도록 방어 로직을 추가하였다.
-
Case1) 상단(P1)·중단(P2)과 하단(P3)이 반대 부호인 경우
\[w_1 = 0,\; w_2 = 0,\; w_3 = \max(w_3, 4),\quad \text{bottom_turn_boost} = 1.5\] - \(\text{bottom_turn_boost}\) 값은 P3가 가까운 도로의 정보이므로 벽에 부딪히지 않고 회전할 시간이 충분하지 않기 때문에 빠른 회전을 위해 증폭해주는 계수이다.
-
Case2) 상단(P1)만 반대 방향이고 중단(P2)와 하단(P3)이 같은 방향인 경우
\[w_1 = 0,\; w_2 = 1.5,\; w_3 = 1.5\]
-
-
가중 상단 중심은 아래의 공식으로 구한다.
\[x_{\text{top}} = \dfrac{\sum_k w_k \, c_{x,k}}{\sum_k w_k}\] -
기울기(하단 대비 상단 이동량)도 정규화 하여 파라미터로 쓰기 편하게 하였다.
\[\text{slope}_{\text{px}} = x_{\text{top}} - c_{x,3}\]P3 좌표와 가중 상단 중심의 차이
\(\text{slope}_{\text{norm}} = \max\!\big(-1,\; \min(\dfrac{\text{slope}_{\text{px}}}{w/2},\; 1)\big)\)\(\dfrac{\text{slope}_{\text{px}}}{w/2}\) 값이 1보다 크면 1로 제한, -1보다 작으면 -1로 제한
-
상단 오프셋(화면 중심선 기준 x좌표 차이) 정규화
\[\text{heading}_{\text{offset}} = \max\!\big(-1,\; \min(\dfrac{x_{\text{top}} - w/2}{w/2} \cdot \text{bottom_turn_boost},\; 1)\big)\]
- 기본 가중치 w=(1.8,1.5,0.9) (P1, P2, P3 순)
3.
- 회전 모드는 \(\text{slope}_{\text{norm}}\) 및 \(\text{heading}_{\text{offset}}\) 값을 사용한다.
- \(\text{slope}_{\text{norm}}\) 값은 회전 모드의 유무를 결정한다.
회전 상태라고 판단 되면,
turn_speed_scale파라미터와turn_steer_scale파라미터가 적용되어 회전각을 크게하고, 전체 주행 속도를 낮춘다. - \(\text{heading}_{\text{offset}}\) 값은 회전 모드의 유무와 회전량을 결정한다. 가중 상단 중심이 중심선에 대해 얼마나 더 멀리 떨어져있는지에 따라 회전량이 비례하게 된다.
- \(\text{slope}_{\text{norm}}\) 값은 회전 모드의 유무를 결정한다.
회전 상태라고 판단 되면,
4.
-
EMA(지수 이동 평균)을 사용하여 회전량의 스파이크를 방지한다.
\[\text{heading}_{\text{used}} = \alpha \cdot \text{heading}_{\text{offset}} + (1 - \alpha) \cdot \text{heading}_{\text{prev}}\]\(\alpha =\)
heading_smooth파라미터
5.
-
PID에 들어가는 Error 입력값은 EMA가 적용된 \(\text{heading}_{\text{used}}\) 값을 사용한다.
\[u(t) = K_p e(t) + K_i \int e(t)\,dt + K_d \frac{de(t)}{dt}\] \[e(t) = \text{heading}_{\text{used}}\]
6.
- 상태 판정(FSM)
- TURN 여부: \(\text{slope}_{\text{norm}}\) >
turn_slope_thresh또는 \(\text{heading}_{\text{used}}\) >turn_offset_thresh - 좌/우 방향:
heading_used부호(양수=RIGHT, 음수/0=LEFT) - 상태별 스케일: TURN이면
- speed =
base_speed*turn_speed_scale - steer_scale =
steer_scale*turn_steer_scale
- speed =
- TURN 여부: \(\text{slope}_{\text{norm}}\) >
7.
- 조향 명령 스케일링
- steer = steering_output(PID 출력값) * steer_scale
8.
- 좌/우 모터 속도 계산
- left_speed = base_speed(기본 차속) ± steer
- right_speed = base_speed ∓ steer
9.
- 최대 속도 제한 필터 거치기
- speed_limit 필터
10.
- 최종 모터 명령 (Ctrl_Muto)
- RaspbotHardware.drive() 함수에 입력값: left_speed, right_speed
-
실제 구조 예시 ↓
def drive(self, left: int, right: int) -> None: """좌우 속도로 주행 (메카넘 직진 기준 동일 방향 회전).""" self.set_motor_speeds(left, left, right, right)
정리
코드를 보면 중간중간 스케일을 조절해 주는 파라미터가 많은 것을 볼 수 있다. 한두 개의 파라미터로 수정해도 되지만, 회전 시의 조향 강도와 일반 주행 시의 조향 강도를 별개로 조절하기 위해서 여러개의 파라미터를 사용하였다.
강도 조절뿐만 아니라 안정성을 높이기 위한 값 제한이나 배율 값을 선정하기도 했다. 개선한 코드에서는 노이즈에 강건하고 부드러운 연속 조향이 가능하게 하자는 목표를 달성하였다.
실제 주행 화면
- P1과 P2가 길 건너를 인식하고 요동치는 특정 상황에서도 방어로직에 의해서 정상적인 코너링을 하는 것을 볼 수 있다.