[Pegasus] PI 제어기 Zero 위치 선정의 트레이드오프
시스템 요구 사항 정의
-
내가 목표로 삼을 제어 스펙이다. 실제 플랜트의 움직임을 먼저 분석한 후, 세틀링 타임이 어느 정도 짧아지면서 반응성이 높아지면 좋을지, 정상 상태 오차가 얼마나 있으면 좋을지 등을 결정한다.
- $T_s$ : 1s
- %$OS$ : 10%
- $e_{\infty}$ : 0
아래는 계산을 위한 실제 파라미터들이다. 인터넷에 나와 있는 자료를 활용 했으며, 일부 값들은 이상적인 조건에서 역연산 되어 계산되었다.
| 파라미터 | 값 | 단위 | 파라미터 | 값 | 단위 | 파라미터 | 값 | 단위 |
|---|---|---|---|---|---|---|---|---|
| $m_b$ | 102 | $kg$ | $r$ | 0.08 | $m$ | $b$ | 0.01 | $N$$\cdot m \cdot s$ |
| $m_w$ | 4 | $kg$ | $R$ | 4.18 | $\Omega$ | $N$ | 25 | . |
| $I_b$ | 7.8412 | $kg \cdot m^2$ | $L$ | 0.012 | $H$ | $K_t$ | 0.0322 | $N \cdot m/A$ |
| $I_{wb}$ | 0.3664 | $kg \cdot m^2$ | $\omega_s$ | 8.0634 | $rad/s$ | $K_e$ | 0.0322 | $V/(rad/s)$ |
| $I_w$ | 0.0128 | $kg \cdot m^2$ | $T_s$ | 6.4489 | $N \cdot m$ | $V_{in}$ | 48 | $V$ |
| $d$ | 0.375 | $m$ | $\omega_m$ | 201.585 | $rad/s$ | $I_s$ | 8 | $A$ |
| $l$ | 0.3 | $m$ | $T_m$ | 0.258 | $N \cdot m$ | $P_s$ | 52 | $W$ |
제어기 설계
전달함수와 시스템 요구 사항이 정해졌으니, 제어기를 설계할 수 있다.
병진 운동 전달함수부터 제어기 설계를 시작해보자.
% 차체 요잉 회전시 파라미터
mb = 102;
mw = 4;
r = 0.08;
d = 0.375;
l = 0.3;
Ib = 1/12 * mb * (4*d^2 + 4*l^2);
Iwb = mw*l^2 + 1/4*mw*r^2;
Iw = 1/2 * mw * r^2;
Ieq = Ib + 2 * Iwb;
M = mb + 2 * mw;
b = 0.01;
% DC 모터 파라미터
N = 25;
V_in = 48;
P_s = 52;
I_s = 8;
w_s = 77 * 2 * pi / 60;
T_s = P_s / w_s;
T_m = T_s / N;
w_m = w_s * N;
K_t = T_m / I_s;
K_e = K_t;
R = 4.18;
L = 0.012;
% 병진 운동 전달함수
num = [2 * V_in * K_t * N * r];
den = [(M * r^2 + 2 * Iw) * L, ((M * r^2 + 2 * Iw) * R + 2 * b * L), (2 * b * R + 2 * N^2 * K_e * K_t)];
sys = tf(num, den);
disp('================= 병진 운동 전달함수 ================');
sys
disp('===================================================');
-
위와 같이 파라미터들을 정리하고 병진 운동 전달 함수를 구해보면,
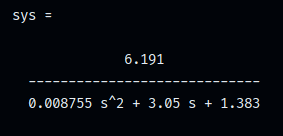
-
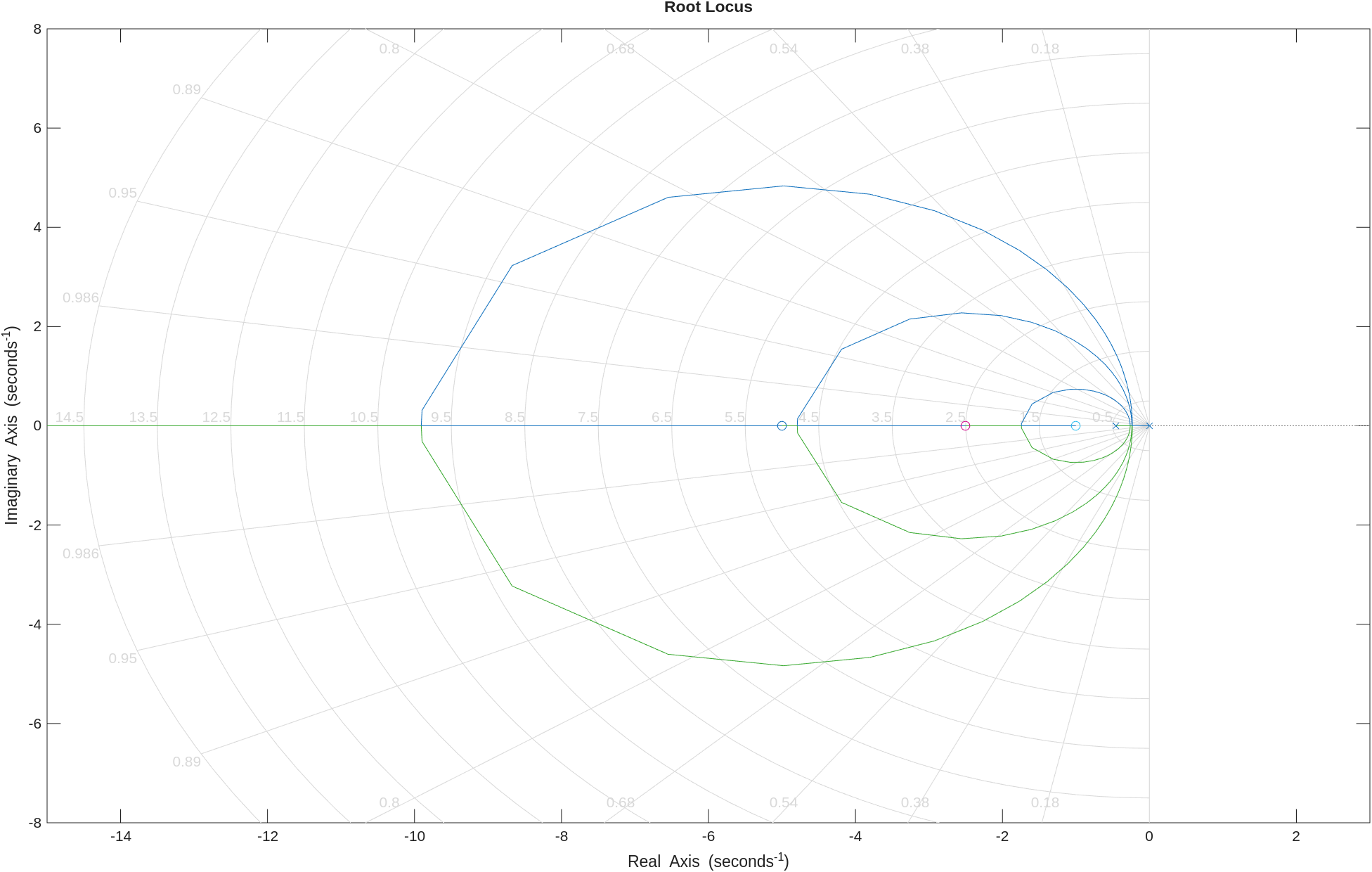
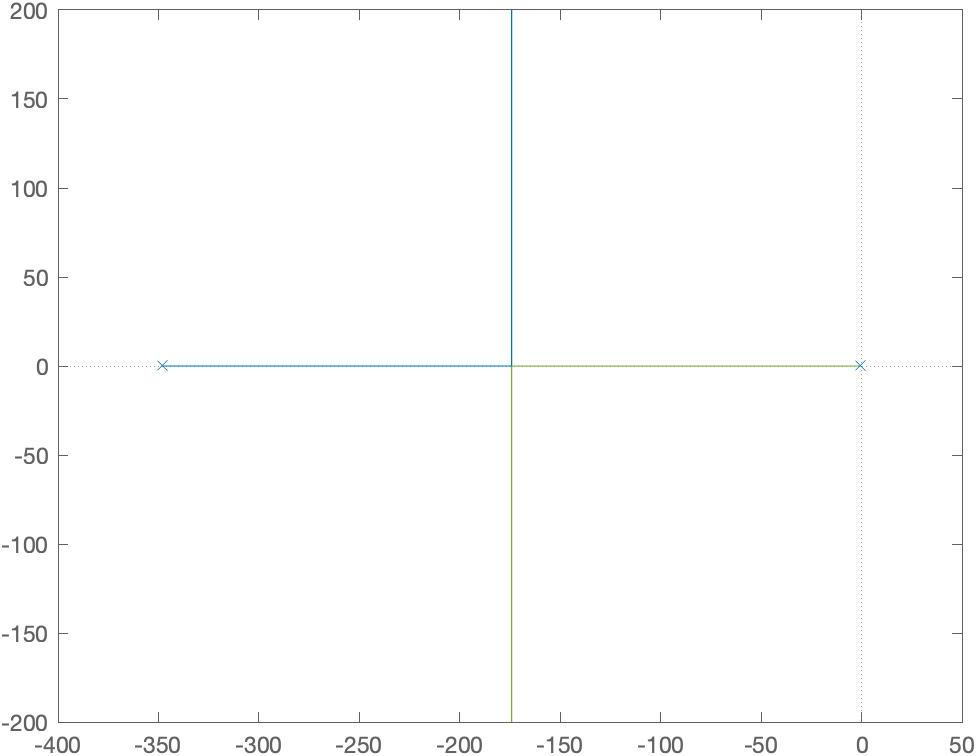
이제 이 전달함수의 루트 로커스를 그려서 안정성과 근의 움직임을 판별해보자.
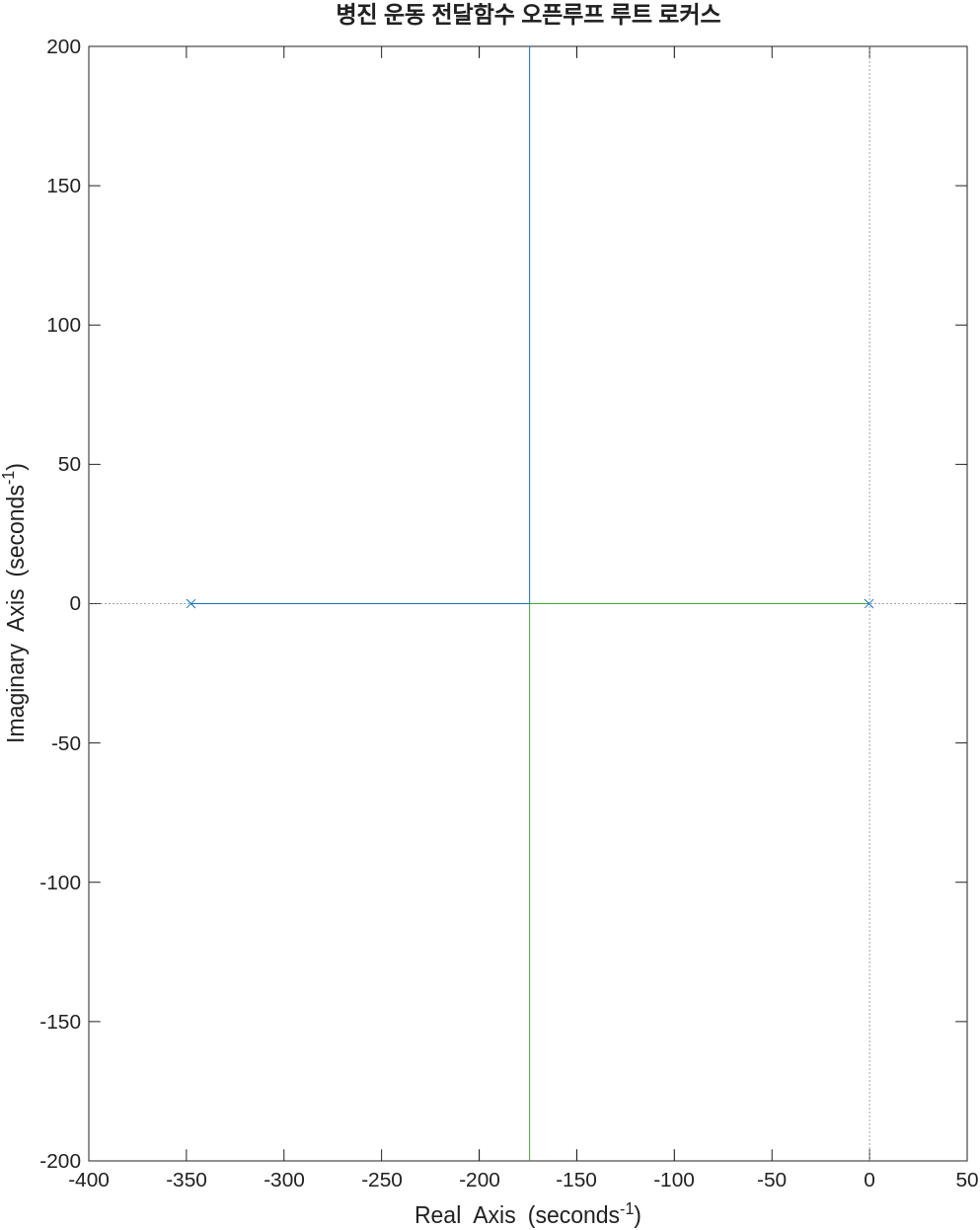
- 루트로커스를 보면
- pole이 -347.9, -0.45인 것을 알 수 있다.
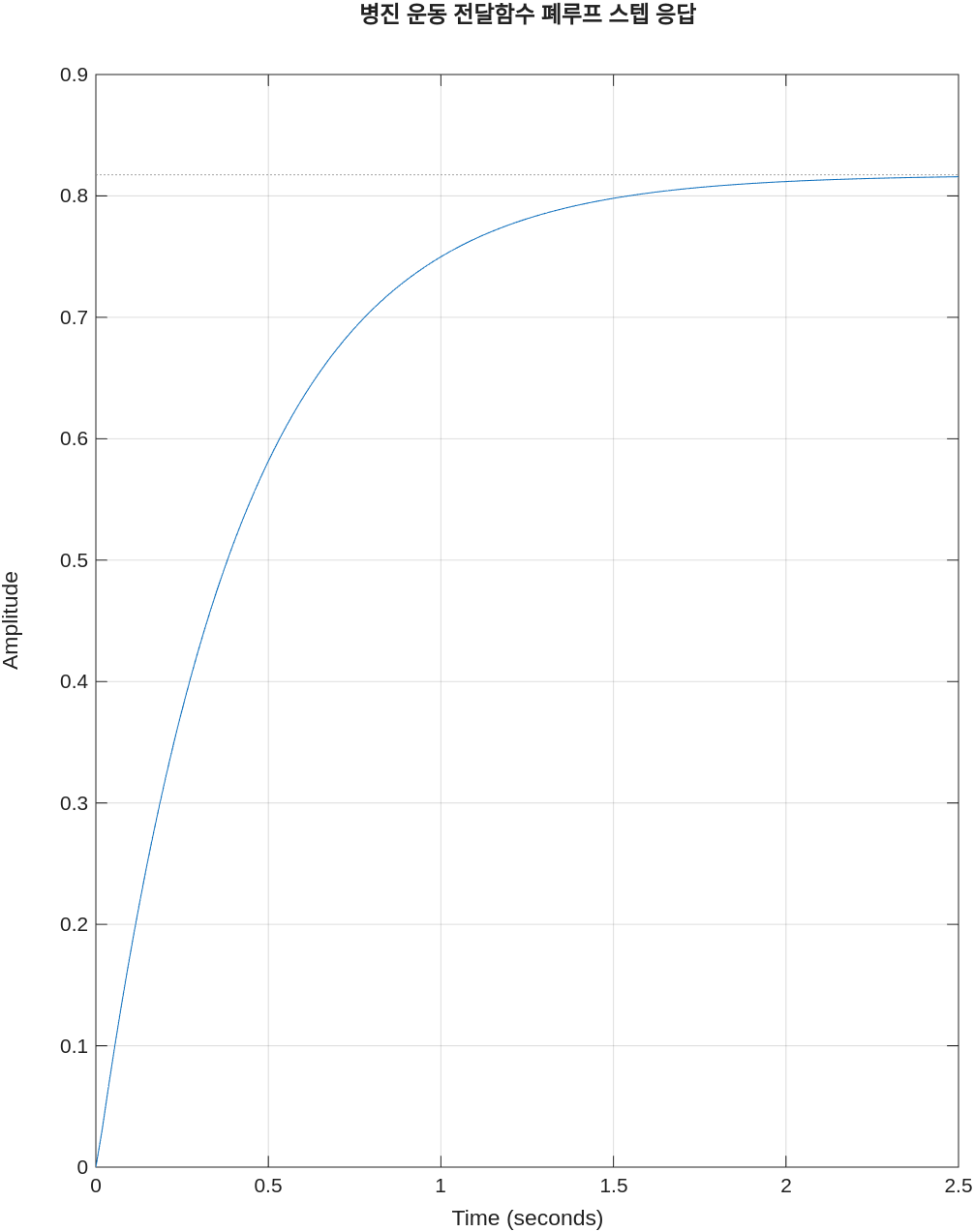
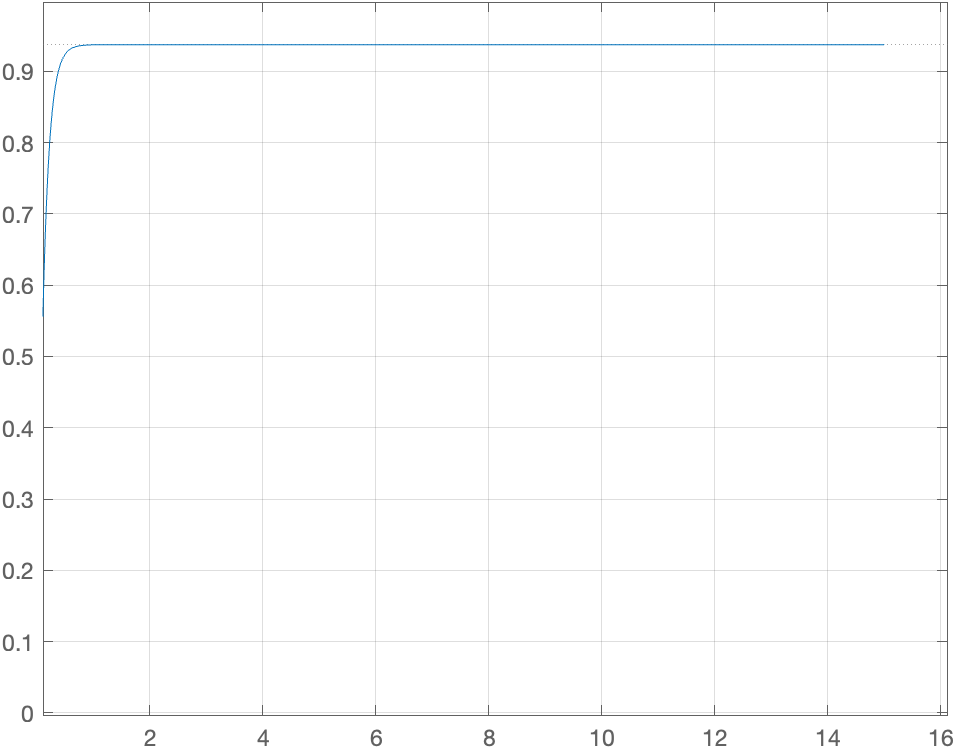
- 오른쪽 응답은 H=1 인 경우 피드백 시스템일 때의 스텝 응답이다. 루트로커스에도 알 수 있지만, 폐루프 응답을 구해보면 극점이 약 -350과 -0.5 정도 나온다.
- $e^{at}$ 형태에서 a에 -350은 바로 사라지는 것으로 볼 수 있기 때문에 시스템은 원점과 가까운 -0.5에의해 좌우된다.
- 따라서 응답이 앞서 예산했듯이 1차 시스템의 응답 형태로 근사 되는 것을 볼 수 있다.
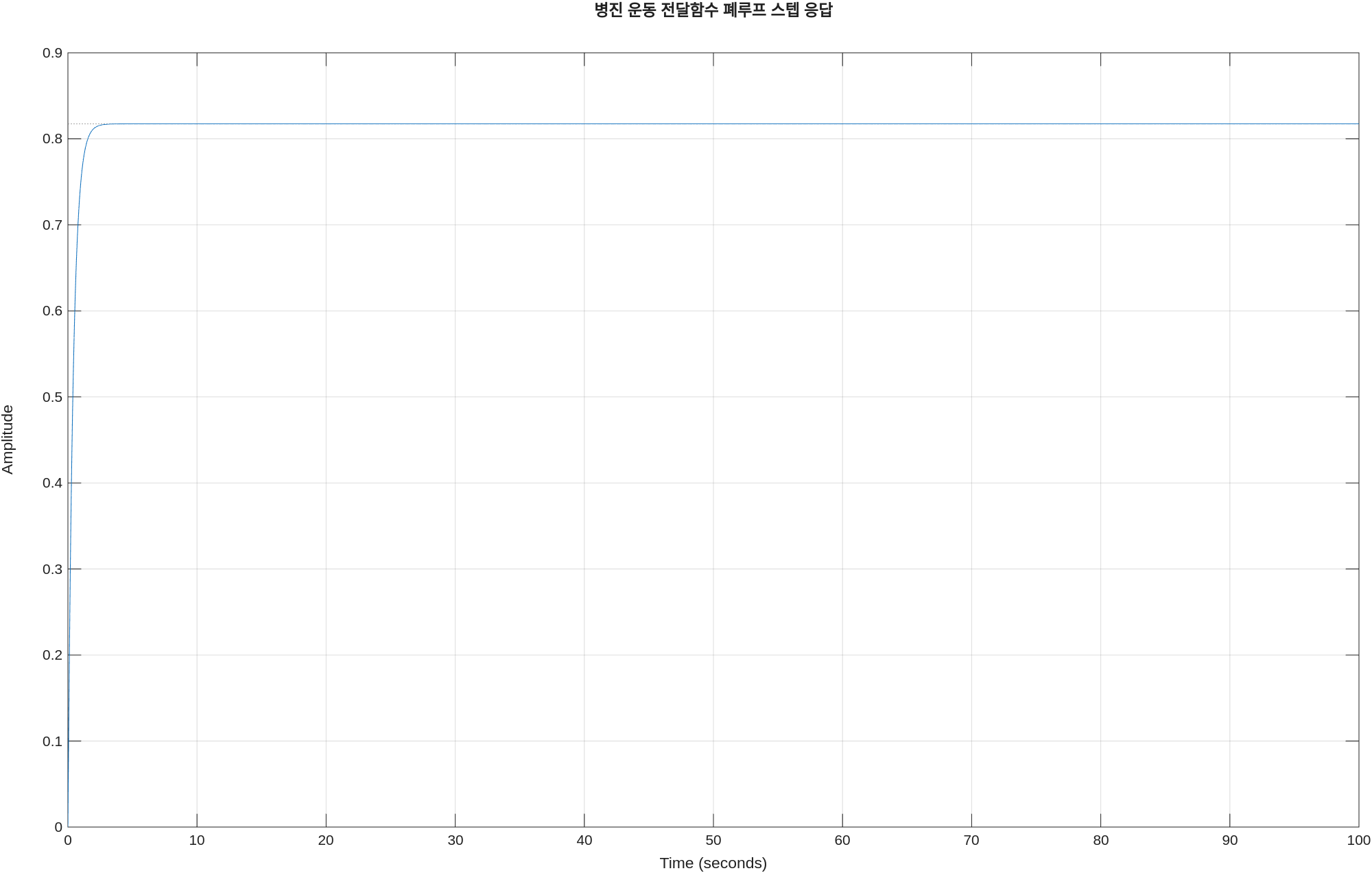
- 폐루프 step input일때 정상상태 오차가 약 0.2 정도 있는 것을 확인 할 수 있다.
- 1차 시스템은 구조적으로 오버슈트나 진동이 없기 때문에 이를 억제할 필요가 없다.
-
따라서 우리는 PI 제어기만 설계를 하면 될 것 같다.
- PI 제어기를 설계 할 때, $\frac{1}{s}$ 에의해 Angle Condition이 만족되지 않아 응답이 달라질 수 있는데
- $\theta_{net} = \theta_{zero} - \theta_{pole} \approx 0$ 를 만족하기 위해서 원점 근처에 제로를 추가 해주면 응답을 크게 변화시키지 않으면서 정상상태 오차만 제거된 안정적인 시스템을 만들 수 있다.
- 우리의 목표는 %OS가 10%인 $\zeta$ = 0.5912일 때이다.
-
위 그래프는 임의로 제로가 -1, -2.5, -5일때의 루트로커스이고, 제타가 0.5912일 때 게인 값들을 구하면
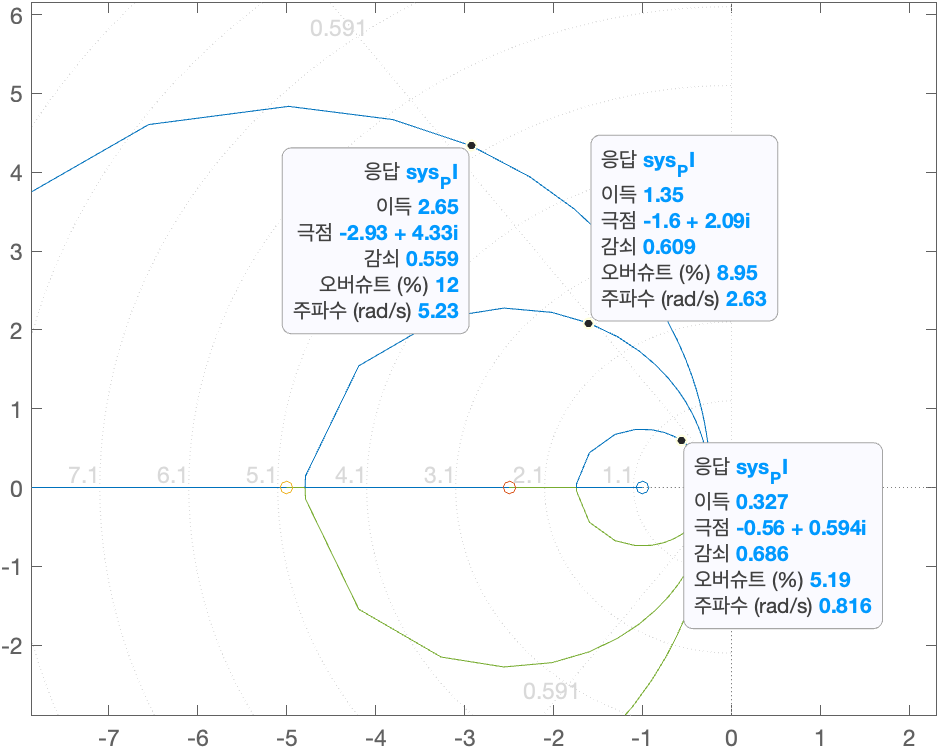
-
제타 0.5912 근처의 값을 임의로 찍고, 그때의 게인은 0.327, 1.35, 2.65이다.
- 제로를 원점에 가깝게 두면, Ts 1초 이내 조건을 달성하기 힘들어진다.
- 제로가 원점에 가까우면 시스템 응답에 아주 느린 성분($e^{-0.1t}$ 같은)이 남게 되어 지배적이게 되어 느린 응답을 만든다.
- 제로는 분자항이라서 역라플라스시 직접적으로 저런 지수함수 형태를 만들 수 없지만, 루트로커스에서 제로가 있다면, 게인이 점점 커지는 상황에서는 폴 중 누군가는 제로 근처에 찍힐 수 밖에 없기 때문에 폴이 제로 근처에 찍히는데 원점 근처라면, 예시의 지수함수처럼 느린 지배적 응답이 될 수도 있기 때문이다.
- 극점 바로 위에 제로를 두어 상쇄 시키는 방법도 있지만, 루트 로커스를 원하는 대로 휘게 할 수 없으므로 LHP의 더 안정적이고 빠른영역인 왼쪽으로 루트 로커스를 당겨올 수 없게 된다.
- 따라서 극점 -0.5 보다 더 작은 영역에서 오버슈트와 응답 속도를 줄타기 할 수 있는 -1, -2.5, -5를 선정해본 것이다.
- 제로가 원점에 가까우면 시스템 응답에 아주 느린 성분($e^{-0.1t}$ 같은)이 남게 되어 지배적이게 되어 느린 응답을 만든다.
- 제로를 원점에 가깝게 두면, Ts 1초 이내 조건을 달성하기 힘들어진다.
-
-
이제 이 게인들로 응답 그래프를 그려보면
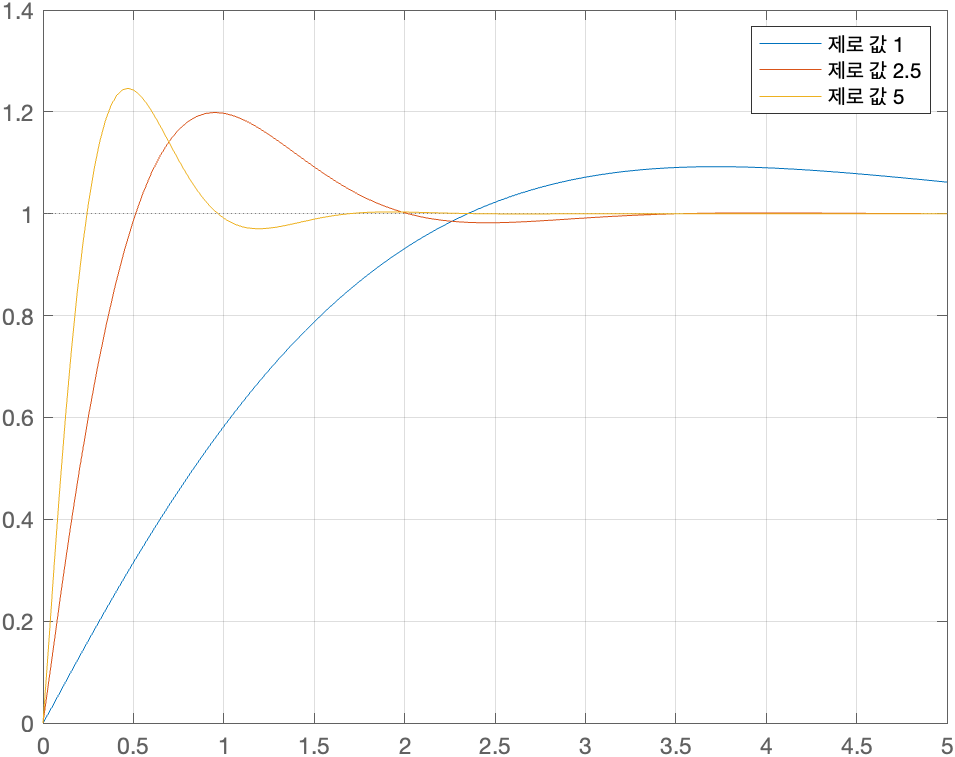
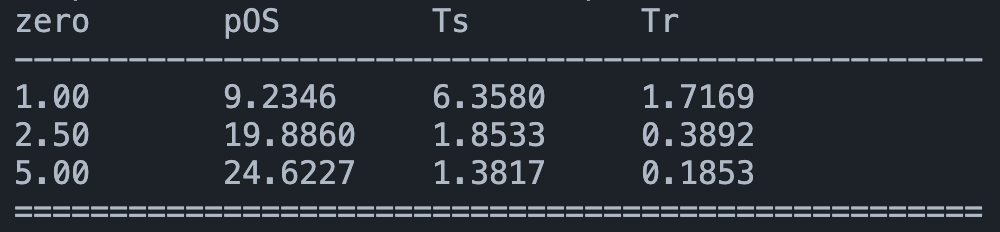
- 어림 잡기 위해서 루트로커스 그래프 툴팁의 파란 글자 오버슈트 값을 보면서 Gain을 선정했지만, 실제 터미널 결과가 달라서 왜 이런일이 일어났는지 알아 보았다.
- 툴팁의 값은 정해진 공식에 값을 대입하는 구조이기 때문에 2차 근사일뿐 실제는 stepinfo를 통해서 구해야 한다는 정보를 매트랩 공식 포럼에서 찾을 수 있었다.
- %OS가 적당하면서 $T_s$ 가 1초를 만족해야 하므로 응답이 빠른 제로가 -2.5 일때를 기준으로 설계해보자.
- 어림 잡기 위해서 루트로커스 그래프 툴팁의 파란 글자 오버슈트 값을 보면서 Gain을 선정했지만, 실제 터미널 결과가 달라서 왜 이런일이 일어났는지 알아 보았다.
- 이제 제로를 -2.5로 고정한 후, 전체이득 $K_{pi}$ 게인 값을 조절하면서 목표에 맞춰보자.v
-
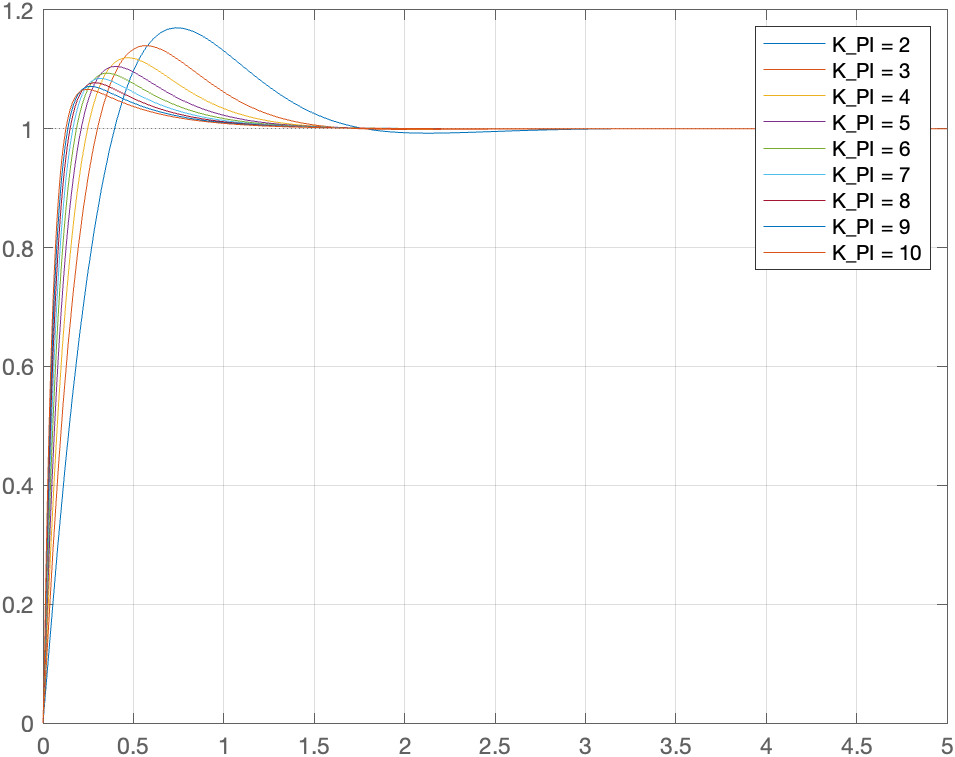
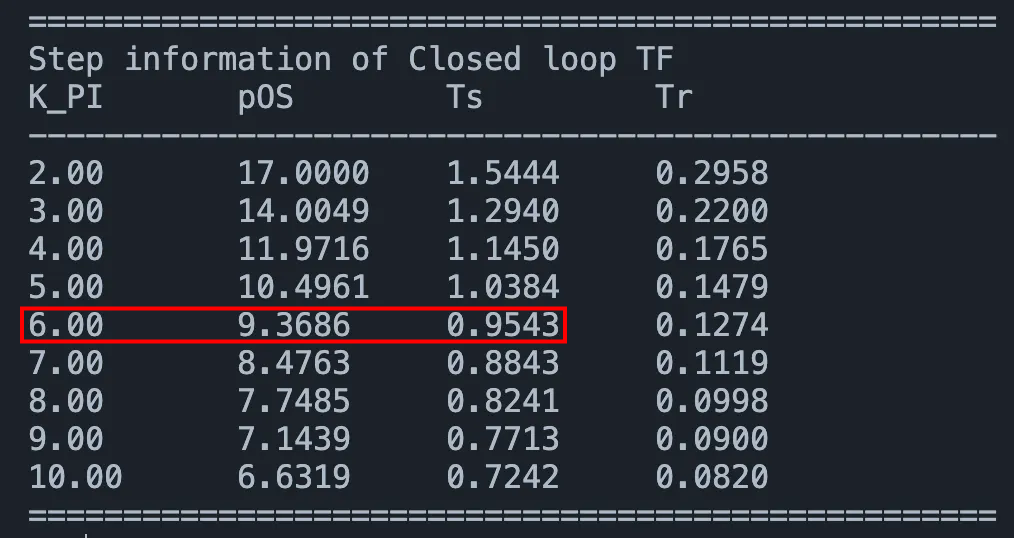
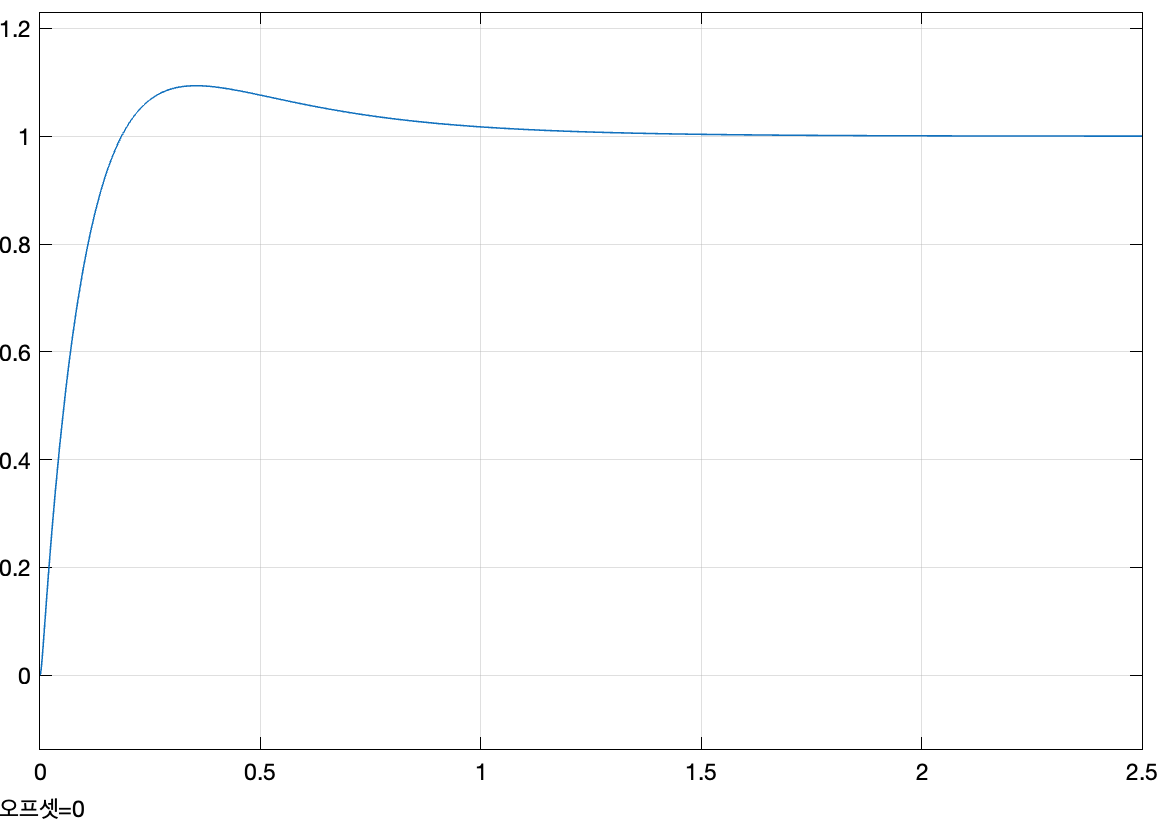
게인 값을 2부터 10까지 순차적으로 할당해서 응답을 그려봤다.
-
$K_{pi}$ 가 6일때 10% 오버슈트 이내, Ts 1초 이내를 달성했고, $e_{\infty}$ 도 원점에 pole이 추가되면서 0인 것을 확인할 수 있다.
-
- 최종적으로 $K_{pi}$ = 6을 선정했고 제로는 -2.5를 선정하였다.
-
따라서 $G_c(s) = K_p + \frac{K_i}{s} = \frac{K_p(s+\frac{K_i}{K_P})}{s} = \frac{6(s+2.5)}{s}$ 이므로 $K_p = 6, \quad K_i = 15$ 를 선정한다.
- 같은 방법으로 회전 운동 전달함수도 제어기를 설계해보자.
- 루트로커스를 보면
- pole이 -347.9, -0.45인 것을 알 수 있다.
- $e_{\infty}$ 도 약 0.07 정도 존재한다.
-
임의의 제로 -1, -2, -3 일때
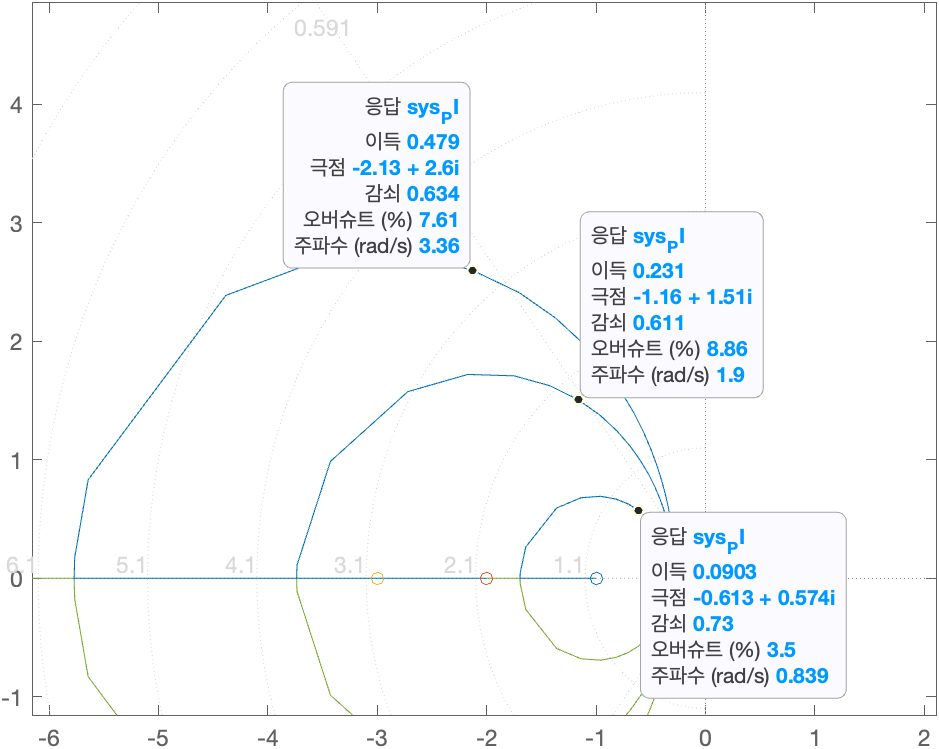
-
$K_{pi}$ 게인이 0.09, 0.231, 0.479이므로 이 게인들로 실제 stepinfo를 얻어보면
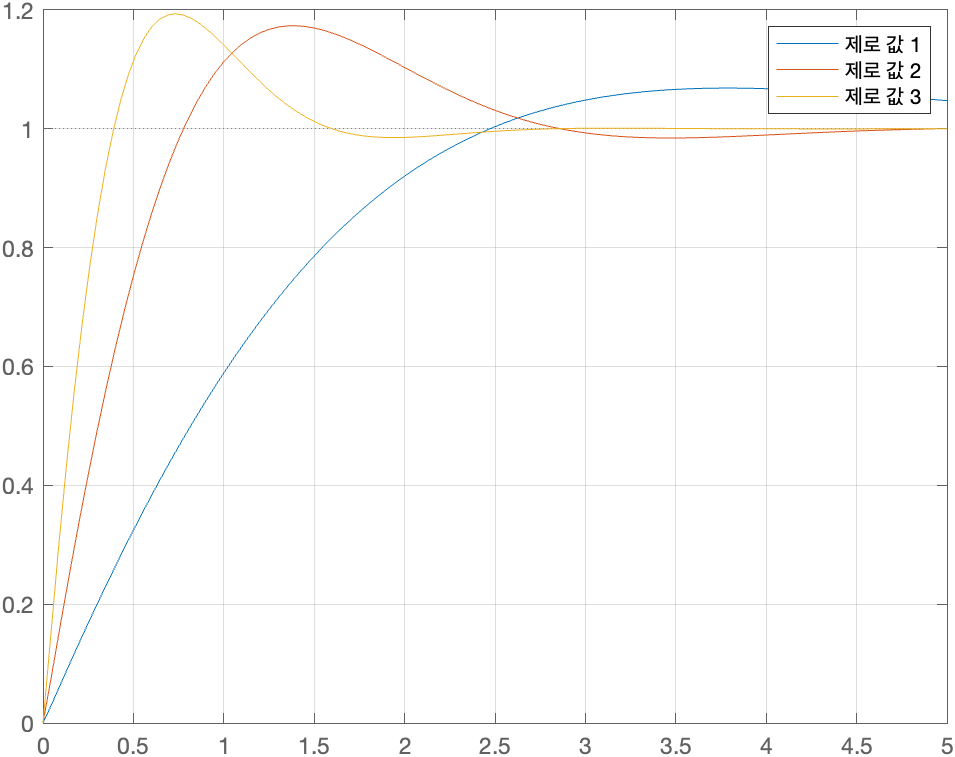
-
제로가 -3 일때를 기준으로 $K_{pi}$ 게인을 선정해보자.
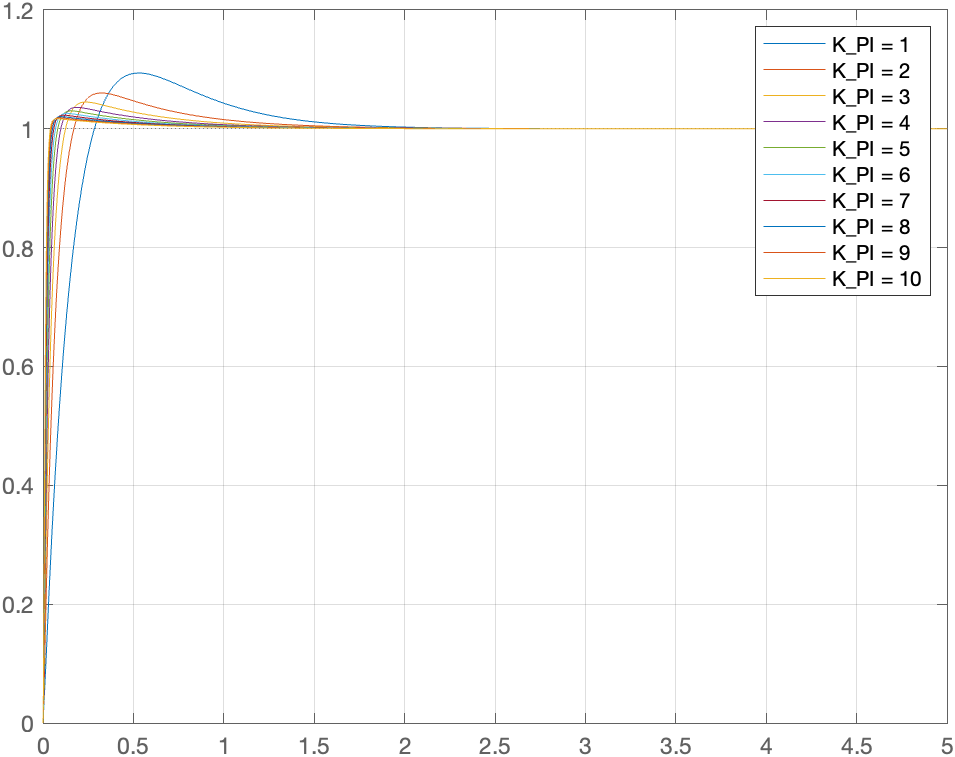
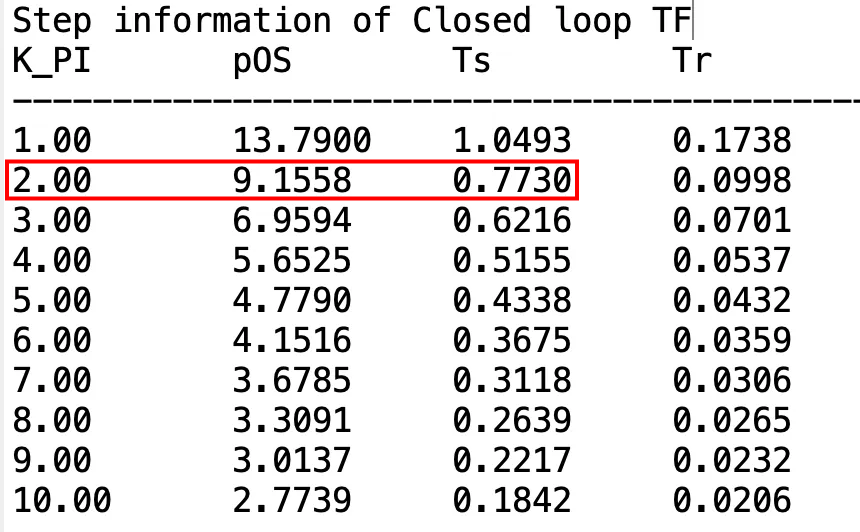
- $K_{pi}$ 값이 2부터 목표에 도달한다.
- 최종적으로 $K_{pi}$ = 2 을 선정했고 제로는 -3를 선정하였다.
- 따라서 $G_c(s) = K_p + \frac{K_i}{s} = \frac{K_p(s+\frac{K_i}{K_P})}{s} = \frac{2(s+3)}{s}$ 이므로 $K_p = 2, \quad K_i = 6$ 를 선정한다.
코드 전문
```matlab
% 차체 요잉 회전시 파라미터
mb = 102;
mw = 4;
r = 0.08;
d = 0.375;
l = 0.3;
Ib = 1/12 * mb * (4*d^2 + 4*l^2);
Iwb = mw*l^2 + 1/4*mw*r^2;
Iw = 1/2 * mw * r^2;
Ieq = Ib + 2 * Iwb;
M = mb + 2 * mw;
b = 0.01;
% DC 모터 파라미터
N = 25;
V_in = 48;
P_s = 52;
I_s = 8;
w_s = 77 * 2 * pi / 60;
T_s = P_s / w_s;
T_m = T_s / N;
w_m = w_s * N;
K_t = T_m / I_s;
K_e = K_t;
R = 4.18;
L = 0.012;
% 병진 운동 전달함수
num = [2 * V_in * K_t * N * r];
den = [(M * r^2 + 2 * Iw) * L, ((M * r^2 + 2 * Iw) * R + 2 * b * L), (2 * b * R + 2 * N^2 * K_e * K_t)];
sys = tf(num, den);
disp('================= 병진 운동 전달함수 ================');
sys
disp('===================================================');
% 병진 운동 전달함수 루트 로커스와 폐루프 스텝 응답
sys2 = feedback(sys, 1);
poles = pole(sys);
disp(['극점 개수: ', num2str(length(poles))]);
disp('극점 좌표:');
disp(poles);
figure(1);
rlocus(sys);
title('병진 운동 전달함수 오픈루프 루트 로커스');
figure(2);
step(sys2,100);
title('병진 운동 전달함수 폐루프 스텝 응답');
grid on;
% PI 제어기 설계
% 목표 제타 구하는 식
POS = 0.1; % 10% 오버슈트
zeta = -log(POS)/sqrt(pi^2 + (log(POS))^2)
% 제어기 영점 후보
z_PI = [1 2.5 5];
figure(3);
for i = 1:length(z_PI)
G_PI = tf([1 z_PI(i)], [1 0]);
sys_PI = sys * G_PI;
rlocus(sys_PI);
sgrid(0.5912, 0.1:1:15);
axis([-15 3 -8 8]);
hold on;
end
% K_pi 값에 따른 응답 특성들
K_PI = [0.327 1.35 2.65];
for i = 1:length(z_PI)
Gc_PI = tf([1 z_PI(i)], [1 0]);
sys_PI = sys * Gc_PI;
T_PI(i) = feedback(K_PI(i) * sys_PI, 1);
data_PI = stepinfo(T_PI(i));
OS_PI(i) = data_PI.Overshoot;
Ts_PI(i) = data_PI.SettlingTime;
Tr_PI(i) = data_PI.RiseTime;
hold on;
end
figure(4);
for i = 1:length(z_PI)
step(T_PI(i), 5);
hold on;
end
hold off;
title('PI 제어기 폐루프 스텝 응답');
legend('제로 값 1', '제로 값 2.5', '제로 값 5');
grid on;
disp('Step information of Closed loop TF');
fprintf('%-10s %-10s %-10s %-10s\n', 'zero', 'pOS', 'Ts', 'Tr');
fprintf('---------------------------------------------------\n');
for i = 1:length(z_PI)
fprintf('%-10.2f %-10.4f %-10.4f %-10.4f\n', ...
z_PI(i), OS_PI(i), Ts_PI(i), Tr_PI(i));
end
disp('===================================================');
% 제로 값 선정 후 K_PI 값 구하기
z_PI = 2.5;
K_PI = [2 3 4 5 6 7 8 9 10];
for i = 1:length(K_PI)
Gc_PI = tf([1 z_PI], [1 0]);
sys_PI = sys * Gc_PI;
T_PI(i) = feedback(K_PI(i) * sys_PI, 1);
data_PI = stepinfo(T_PI(i));
OS_PI(i) = data_PI.Overshoot;
Ts_PI(i) = data_PI.SettlingTime;
Tr_PI(i) = data_PI.RiseTime;
end
figure(5);
for i = 1:length(K_PI)
step(T_PI(i), 5);
hold on;
end
hold off;
title('PI 제어기 폐루프 스텝 응답');
legend('K_PI = 2', 'K_PI = 3', 'K_PI = 4', 'K_PI = 5', 'K_PI = 6', 'K_PI = 7', 'K_PI = 8', 'K_PI = 9', 'K_PI = 10');
grid on;
disp('Step information of Closed loop TF');
fprintf('%-10s %-10s %-10s %-10s\n', 'K_PI', 'pOS', 'Ts', 'Tr');
fprintf('---------------------------------------------------\n');
for i = 1:length(K_PI)
fprintf('%-10.2f %-10.4f %-10.4f %-10.4f\n', ...
K_PI(i), OS_PI(i), Ts_PI(i), Tr_PI(i));
end
disp('===================================================');
% 회전 운동 전달함수
num = [2 * V_in * r * l * K_t * N];
den = [(Ieq * r^2 + 2 * l^2 * Iw) * L, ((Ieq * r^2 + 2 * l^2 * Iw) * R + 2 * l^2 * b * L), (2 * l^2 * b * R + 2 * N^2 * l^2 * K_e * K_t)];
sys = tf(num, den);
disp('================= 회전 운동 전달함수 ================');
sys
disp('===================================================');
% 회전 운동 전달함수 루트 로커스와 폐루프 스텝 응답
sys2 = feedback(sys, 1);
poles = pole(sys);
disp(['극점 개수: ', num2str(length(poles))]);
disp('극점 좌표:');
disp(poles);
figure(6);
rlocus(sys);
title('회전 운동 전달함수 오픈루프 루트 로커스');
figure(7);
step(sys2, 15);
title('회전 운동 전달함수 폐루프 스텝 응답');
grid on;
% PI 제어기 설계
% 목표 제타 구하는 식
POS = 0.1; % 10% 오버슈트
zeta = -log(POS)/sqrt(pi^2 + (log(POS))^2)
% 제어기 영점 후보
z_PI = [1 2 3];
figure(8);
for i = 1:length(z_PI)
G_PI = tf([1 z_PI(i)], [1 0]);
sys_PI = sys * G_PI;
rlocus(sys_PI);
sgrid(0.5912, 0.1:1:15);
axis([-8 3 -4 4]);
hold on;
end
% K_PI 값에 따른 응답 특성들
K_PI = [0.09 0.231 0.479];
for i = 1:length(z_PI)
Gc_PI = tf([1 z_PI(i)], [1 0]);
sys_PI = sys * Gc_PI;
T_PI(i) = feedback(K_PI(i) * sys_PI, 1);
data_PI = stepinfo(T_PI(i));
OS_PI(i) = data_PI.Overshoot;
Ts_PI(i) = data_PI.SettlingTime;
Tr_PI(i) = data_PI.RiseTime;
hold on;
end
figure(9);
for i = 1:length(z_PI)
step(T_PI(i), 5);
hold on;
end
hold off;
title('PI 제어기 폐루프 스텝 응답');
legend('제로 값 1', '제로 값 2', '제로 값 3');
grid on;
disp('Step information of Closed loop TF');
fprintf('%-10s %-10s %-10s %-10s\n', 'zero', 'pOS', 'Ts', 'Tr');
fprintf('---------------------------------------------------\n');
for i = 1:length(z_PI)
fprintf('%-10.2f %-10.4f %-10.4f %-10.4f\n', ...
z_PI(i), OS_PI(i), Ts_PI(i), Tr_PI(i));
end
disp('===================================================');
% 제로 값 선정 후 K_PI 값 구하기
z_PI = 3;
K_PI = [1 2 3 4 5 6 7 8 9 10];
for i = 1:length(K_PI)
Gc_PI = tf([1 z_PI], [1 0]);
sys_PI = sys * Gc_PI;
T_PI(i) = feedback(K_PI(i) * sys_PI, 1);
data_PI = stepinfo(T_PI(i));
OS_PI(i) = data_PI.Overshoot;
Ts_PI(i) = data_PI.SettlingTime;
Tr_PI(i) = data_PI.RiseTime;
end
figure(10);
for i = 1:length(K_PI)
step(T_PI(i), 5);
hold on;
end
hold off;
title('PI 제어기 폐루프 스텝 응답');
legend('K_PI = 1', 'K_PI = 2', 'K_PI = 3', 'K_PI = 4', 'K_PI = 5', 'K_PI = 6', 'K_PI = 7', 'K_PI = 8', 'K_PI = 9', 'K_PI = 10');
grid on;
disp('Step information of Closed loop TF');
fprintf('%-10s %-10s %-10s %-10s\n', 'K_PI', 'pOS', 'Ts', 'Tr');
fprintf('---------------------------------------------------\n');
for i = 1:length(K_PI)
fprintf('%-10.2f %-10.4f %-10.4f %-10.4f\n', ...
K_PI(i), OS_PI(i), Ts_PI(i), Tr_PI(i));
end
disp('===================================================');
```
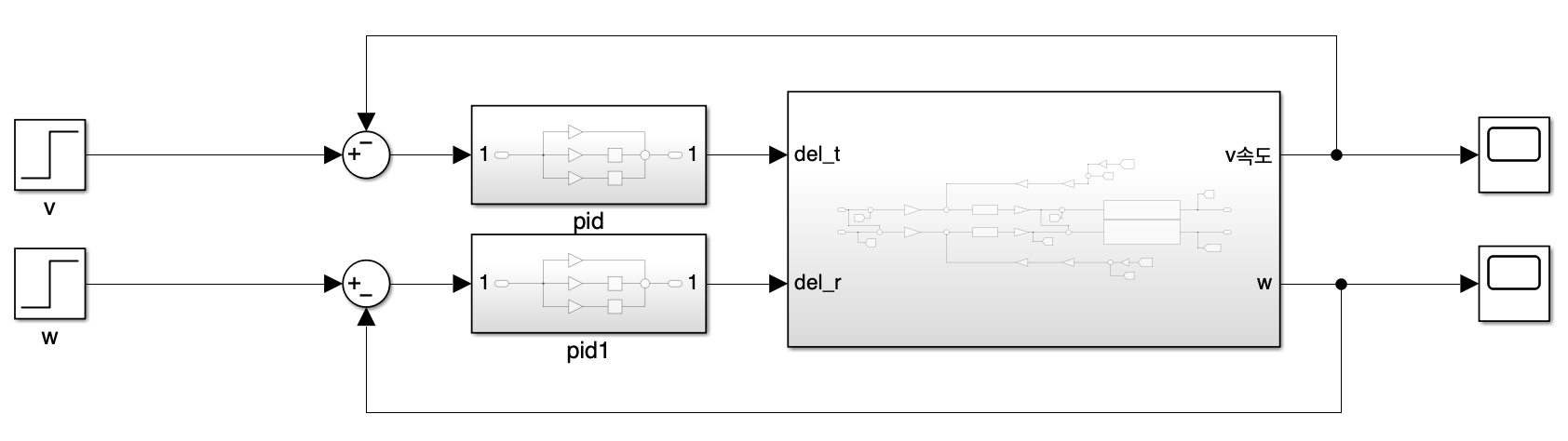
Simulink 모델 만들기
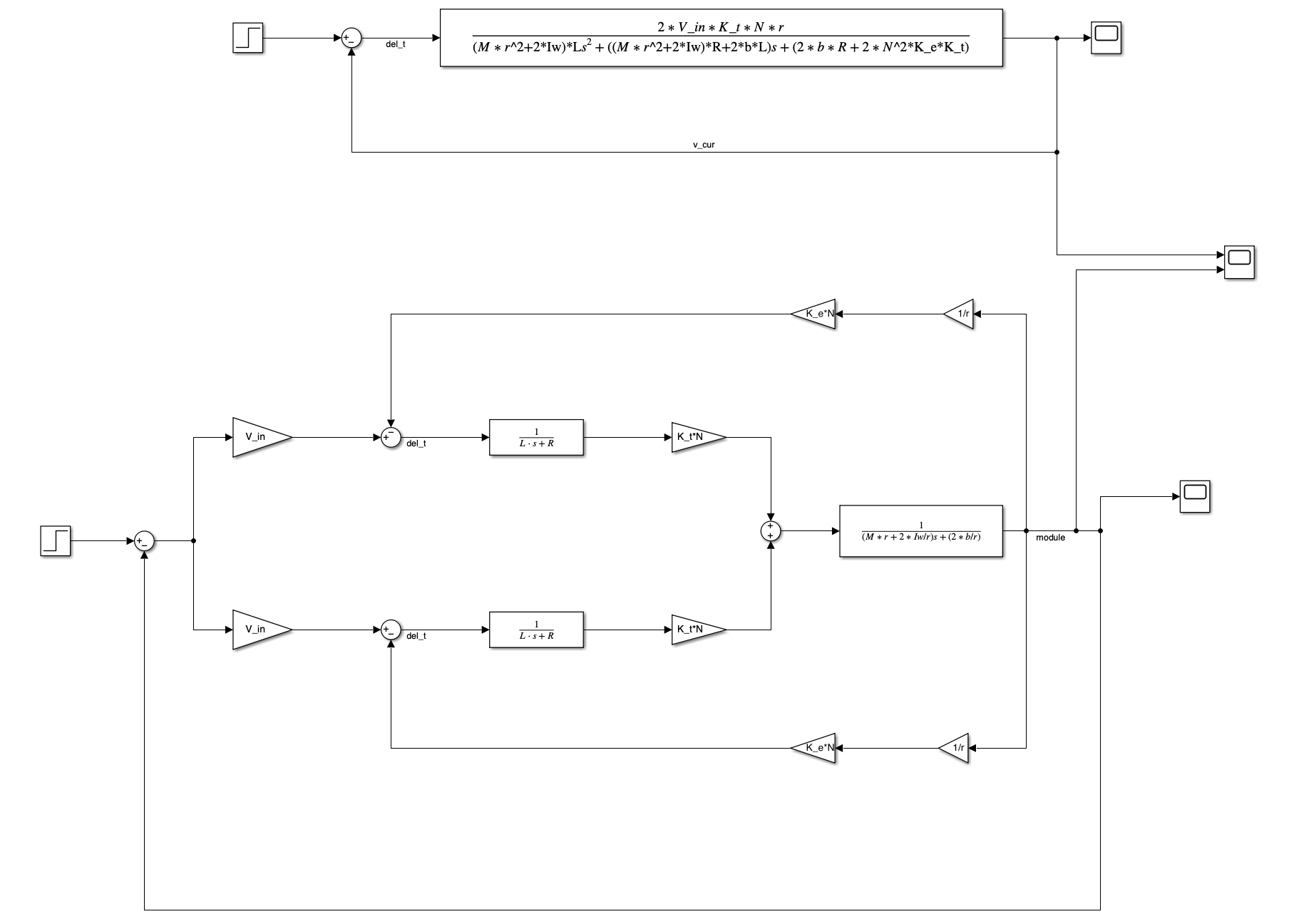
- 식(6) 병진 운동 전달함수를 한 번에 피드백 구조로 만든 다이어그램(상단)과 직접 항 하나하나 다이어그램(하단)으로 모델을 만들었다.
- 하단의 첫 피드백은 수식에 있는 뺄셈 연산을 위한 것이 아니라 피드백을 위해 출력 값을 받아와서 입력값과 빼는 것이고
- del_t 부분의 빼기 연산은 오직 수식의 뺄셈 연산을 구현하기 위한 것이다.
-
가장 오른쪽 끝의 scope를 통해 두 모델의 응답을 확인할 수 있다.
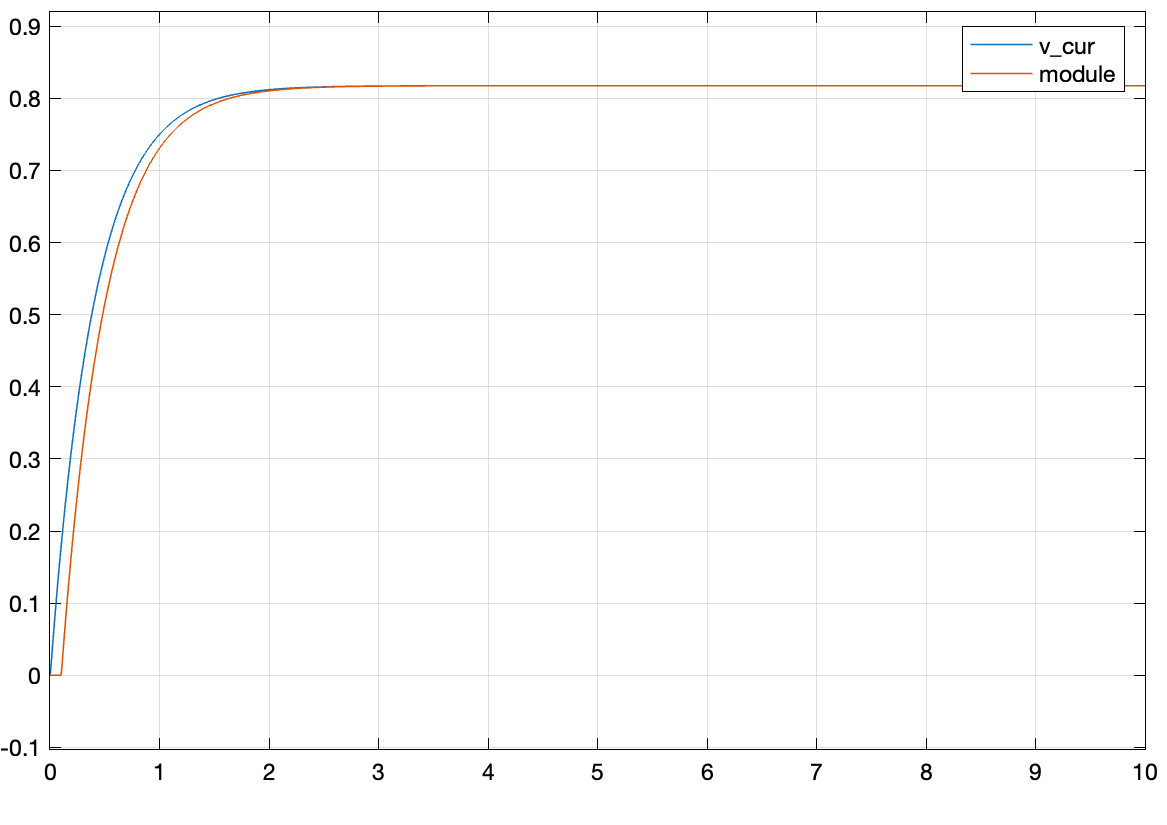
- 구분을 위해 하단 다이어그램의 값을 0.1초 지연 후 그려지게 했다.
- 두 응답의 결과가 같다는 것으로 부터 모델링이 잘 되었다는 것을 알 수 있다.
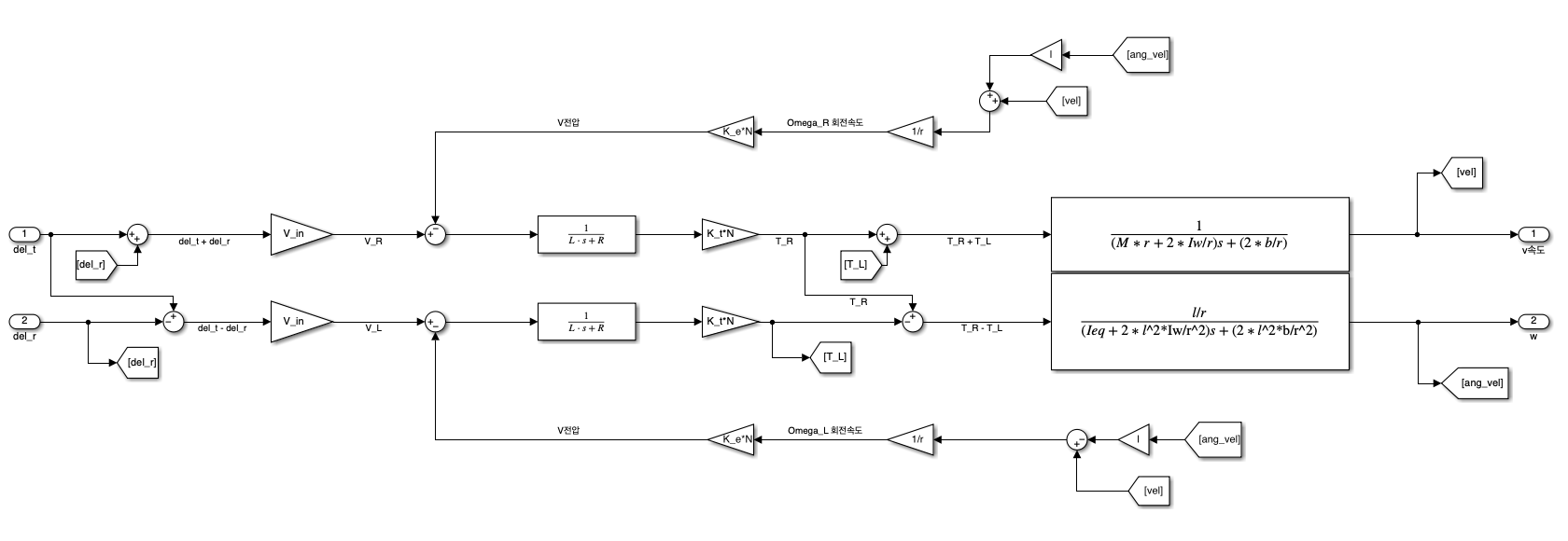
- subsystem 기능을 이용하여 plant와 pid 제어기를 각각 분리해서 모델링하였다.
- 시스템 전달함수 구조
- 이 모델에서 ($\delta_t, \delta_r)$는 모터 입력 전압을 $V_{in}$에 대해 정규화한 조작량(무차원)이며, $V_R = V_{in}(\delta_t+\delta_r)$, $V_L = V_{in}(\delta_t-\delta_r)$로 좌/우 바퀴 전압 명령을 구성한다. 따라서 $K_p$는 속도 오차(m/s 또는 rad/s)를 정규화 입력(무차원)으로 변환하는 단위를 갖는다.
-
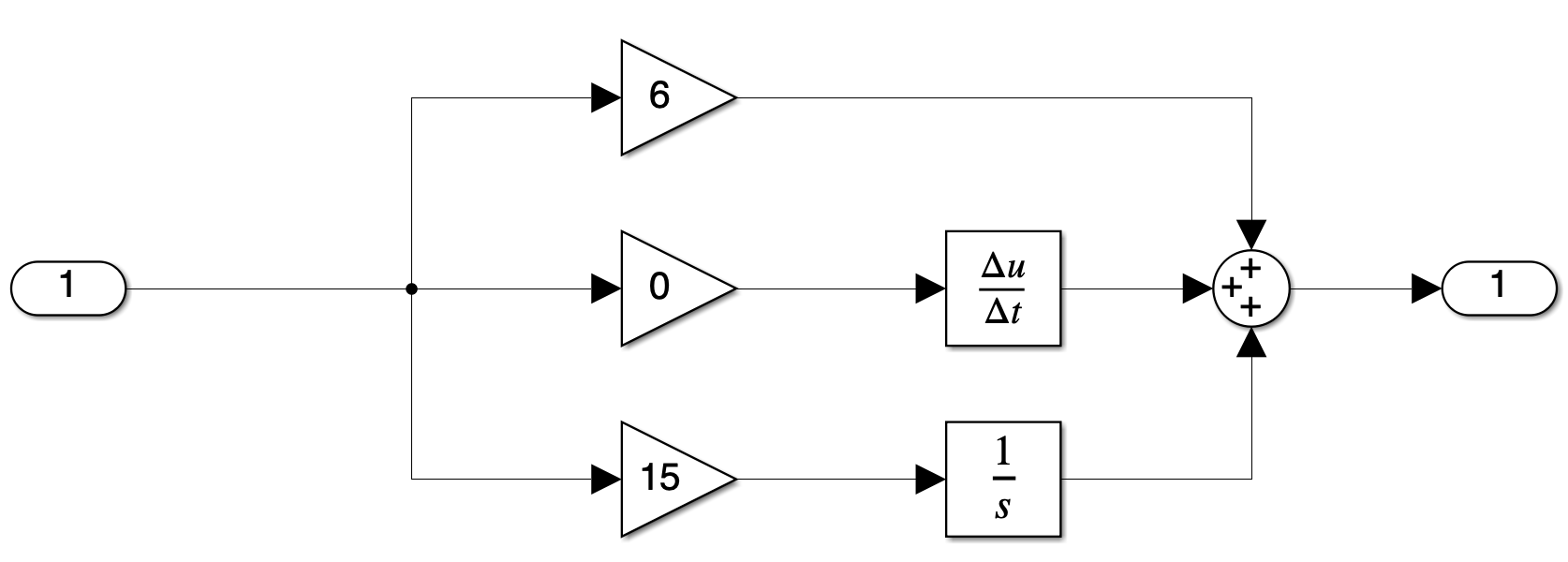
pid 제어기 구조
- 전체 다이어그램
- 레퍼런스 입력 : $v, w$
- 플랜트 제어 입력 : $\delta_t, \delta_r$
-
최종 병진 운동 응답을 보니 매트랩으로 그린 제어기 설계 후 응답과 동일하게 나왔고, 알맞게 모델링 됐음을 알 수 있다.
- 시스템 전달함수 구조
파라미터 변화에 따른 응답 변화
-
$K_P$ 값을 1, 2, 3으로 설정 후 $K_I$ 는 동일하게 6인 경우
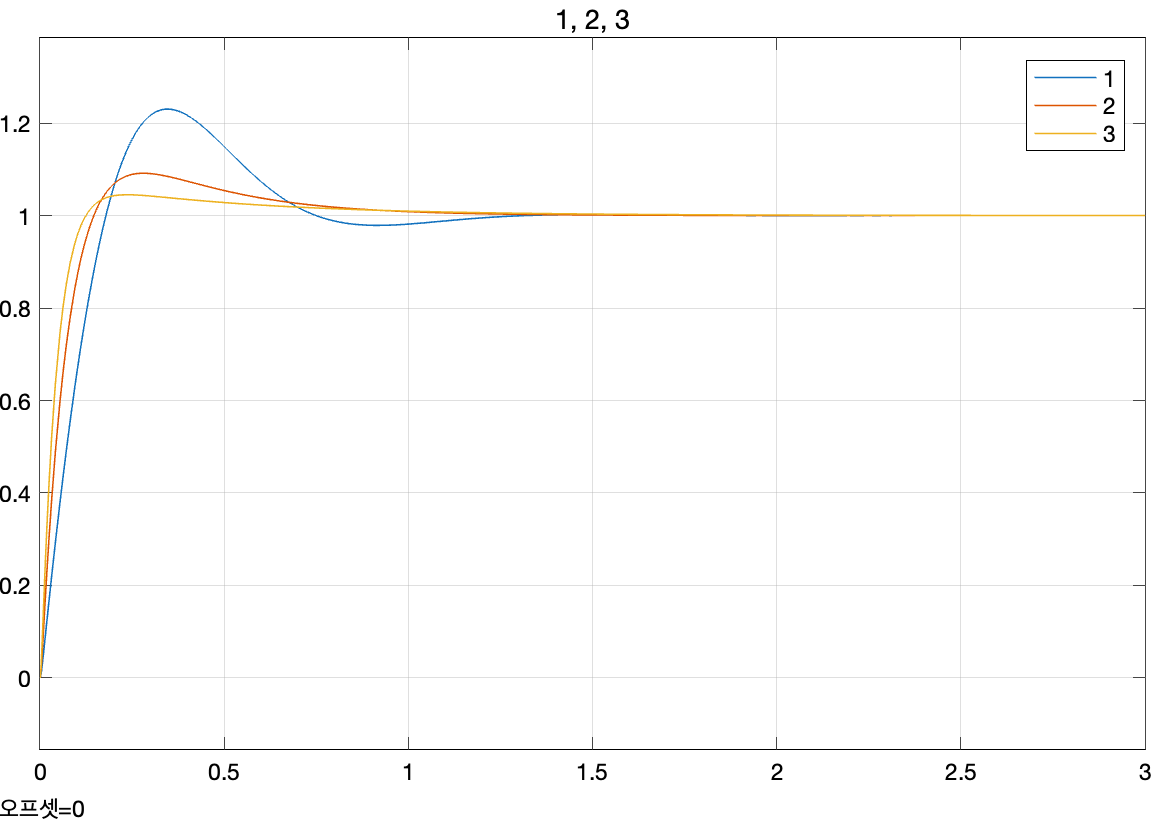
- P 게인이 커질수록 반응성도 빠르고 오버슈트도 줄어든다.
-
$K_P$ 값을 2로 설정 $K_I$ 는 동일하게 6, $K_D$ 가 0, 1, 2인 경우
- D 제어기를 사용함과 동시에 불안정해진다.
-
분자에 추가된 s가 step input이 들어오는 시점에 기울기를 거의 $\infty$ 로 보기 때문에 아주 짧은 시간 동안 전압 명령이 매우 커져서 오히려 불안정해지는 것이다.
-
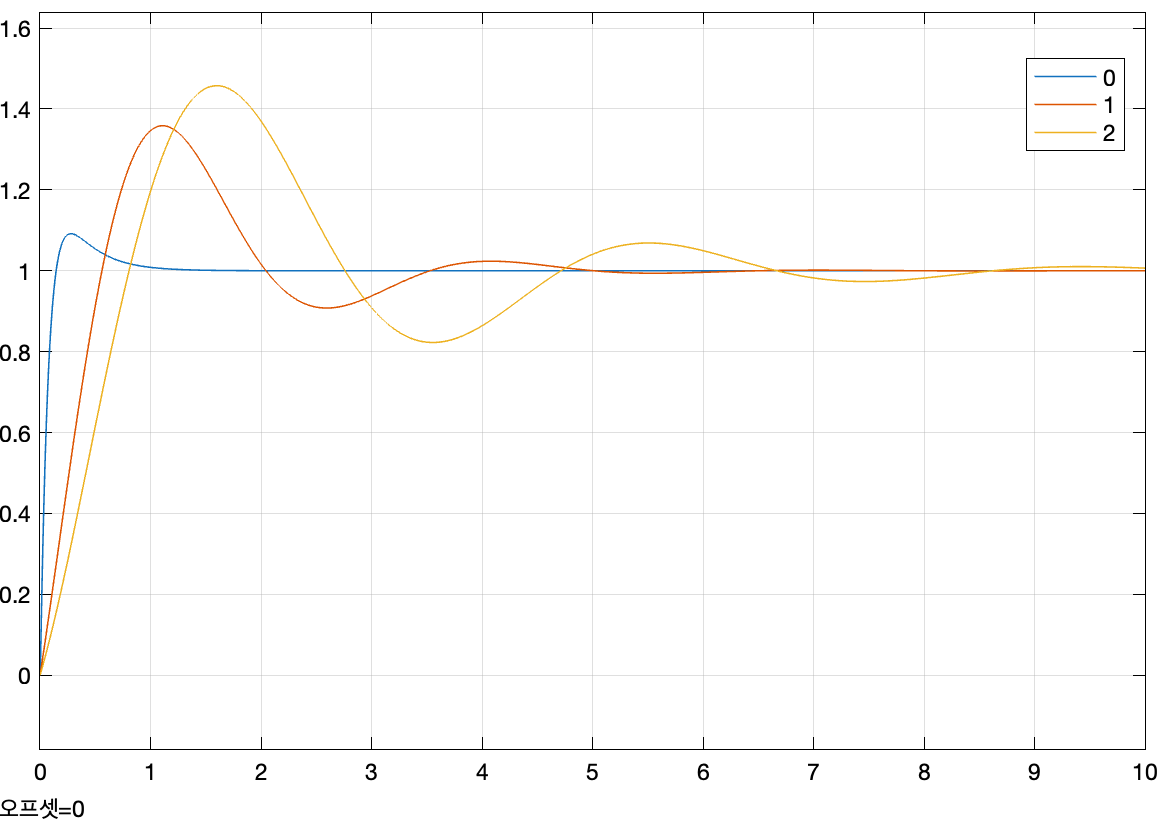
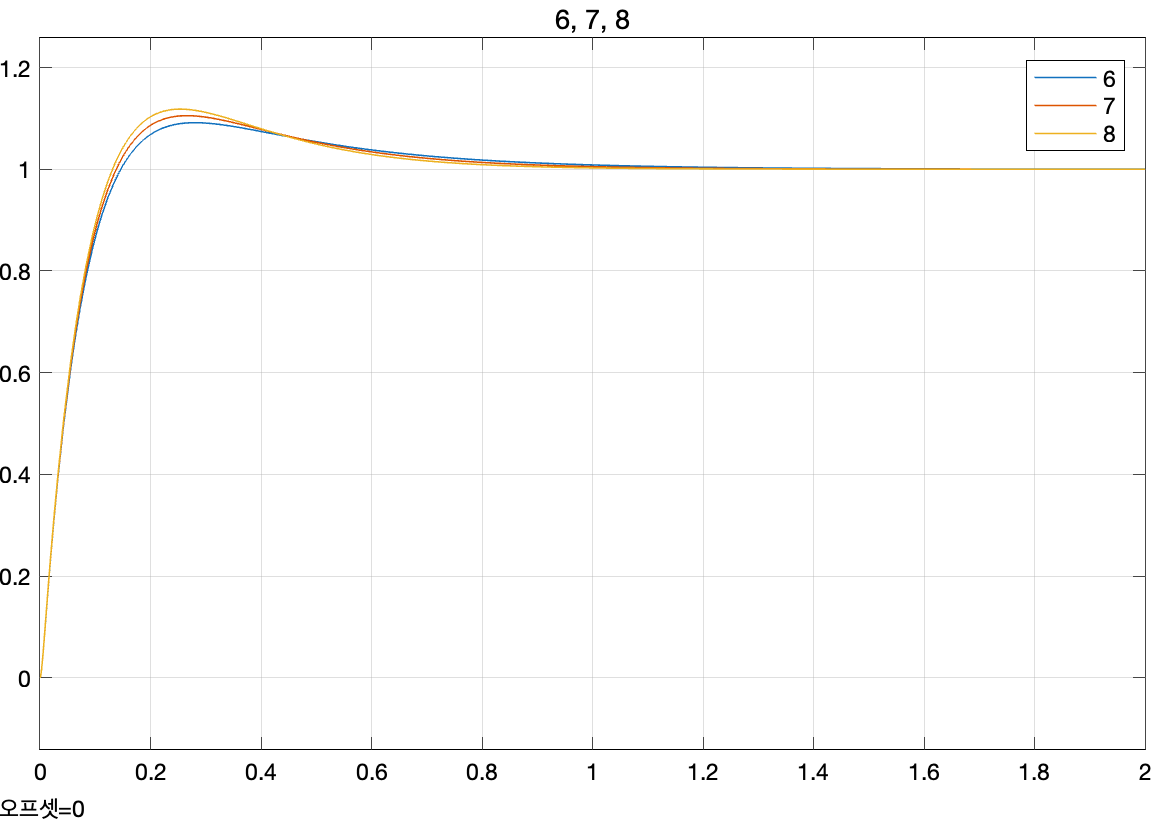
$K_P$ 값을 2로 설정 $K_I$ 는 6, 7, 8, $K_D$ 가 0 인 경우
- 오버슈트가 증가하지만 $T_s$ 는 조금씩 감소한다.
차동 구동 로봇의 병진과 회전의 Decoupling 분석
Simulink 모델링 중, 회전 입력 $\delta_r$을 변화시켜 각속도가 발생하고 있음에도 불구하고, 병진 속도의 그래프는 전혀 영향을 받지 않고 일정하게 유지되는 것을 발견했다. 분명 내가 설계한 플랜트 다이어그램 내부적으로는 왼쪽/오른쪽 모터가 $v$ 와 $\omega$ 의 영향을 동시에 받고 있는데 최종 출력단에서는 $\delta_r$ 을 바꿔도 출력 속도 응답 그래프에 영향이 없이 서로 독립적인 것처럼 보이는 이유를 분석해봤다.
-
수식적 원인 분석
1. 입력 전압단에서의 상쇄
- 로봇을 앞으로 밀어주는 직진 힘은 양쪽 모터 전압의 합에 비례한다.
-
이때 회전 제어 입력 $\delta_r$ 은 우측엔 더해지고 좌측엔 빼지므로, 합을 구하는 순간 소거된다.
$V_{sum} = V_R + V_L \propto (\delta_t + \mathbf{\delta_r}) + (\delta_t - \mathbf{\delta_r}) = 2\delta_t$
- 즉, 직진 운동 방정식의 입력항에는 오직 직진 명령 $\delta_t$ 만 살아남게 된다.
2. 피드백 루프에서의 상쇄
- 역기전력(Back-EMF) 피드백 역시 직진 운동에 방해가 되는 요소이므로, 좌우 역기전력의 합이 전체 시스템의 감속 요인이 된다.
-
각 바퀴의 속도는 $v$ 와 $\omega$ 의 선형 결합으로 표현되는데, 이를 합치면 회전 성분이 상쇄된다.
$\begin{aligned} V_{emf, total} &\propto \Omega_R + \Omega_L \ &\propto (v + l\omega) + (v - l\omega) \ &= 2v \end{aligned}$
- 결과적으로 직진 운동을 방해하는 역기전력 항에서도 $\omega$ 성분은 사라지고 오직 $v$성분만 남는다.
- 공학적으로
- 시스템의 직교성 (Orthogonality)
- 차동 구동 시스템이 완벽하게 대칭이라고 가정할 때, 병진 운동과 회전 운동은 수학적으로 직교한다.
- 이는 x축으로 이동한다고 해서 y축 좌표가 변하지 않는 것과 같은 원리이다.
- 내부와 외부의 관점 차이
- Local 관점 (각 모터): 개별 모터는 $\delta_r$ 과 $\omega$ 의 영향을 받아 전압과 전류가 요동친다. (오른쪽은 힘들어지고, 왼쪽은 편해짐)
- Global 관점 (로봇 몸체): 로봇 몸체의 직진 가속도는 두 모터 힘의 총합으로 결정된다. 내부적으로 에너지가 한쪽으로 쏠릴 뿐, 전체 에너지의 총합(직진 성분)은 변하지 않기 때문에 외부에서 볼 때는 영향이 없는 것처럼 보인다.
- 줄다리기로 비유하자면
- 수레를 끌 때 오른쪽 사람은 더 세게 당기고, 왼쪽 사람은 살살 당겨도, 두 힘의 합이 일정하다면 수레가 회전할 뿐 앞으로 나가는 속도는 변하지 않는 것과 같다.
- 시스템의 직교성 (Orthogonality)
- 결론
- 선형 시스템 모델에서는 중첩의 원리에 의해 직진과 회전이 완벽하게 분리(Decoupling)된다.
- 실제 하드웨어에서는 모터 성능 차이, 배터리 전압 강하 등의 비선형성으로 인해 약간의 간섭이 발생할 수 있다고 한다.